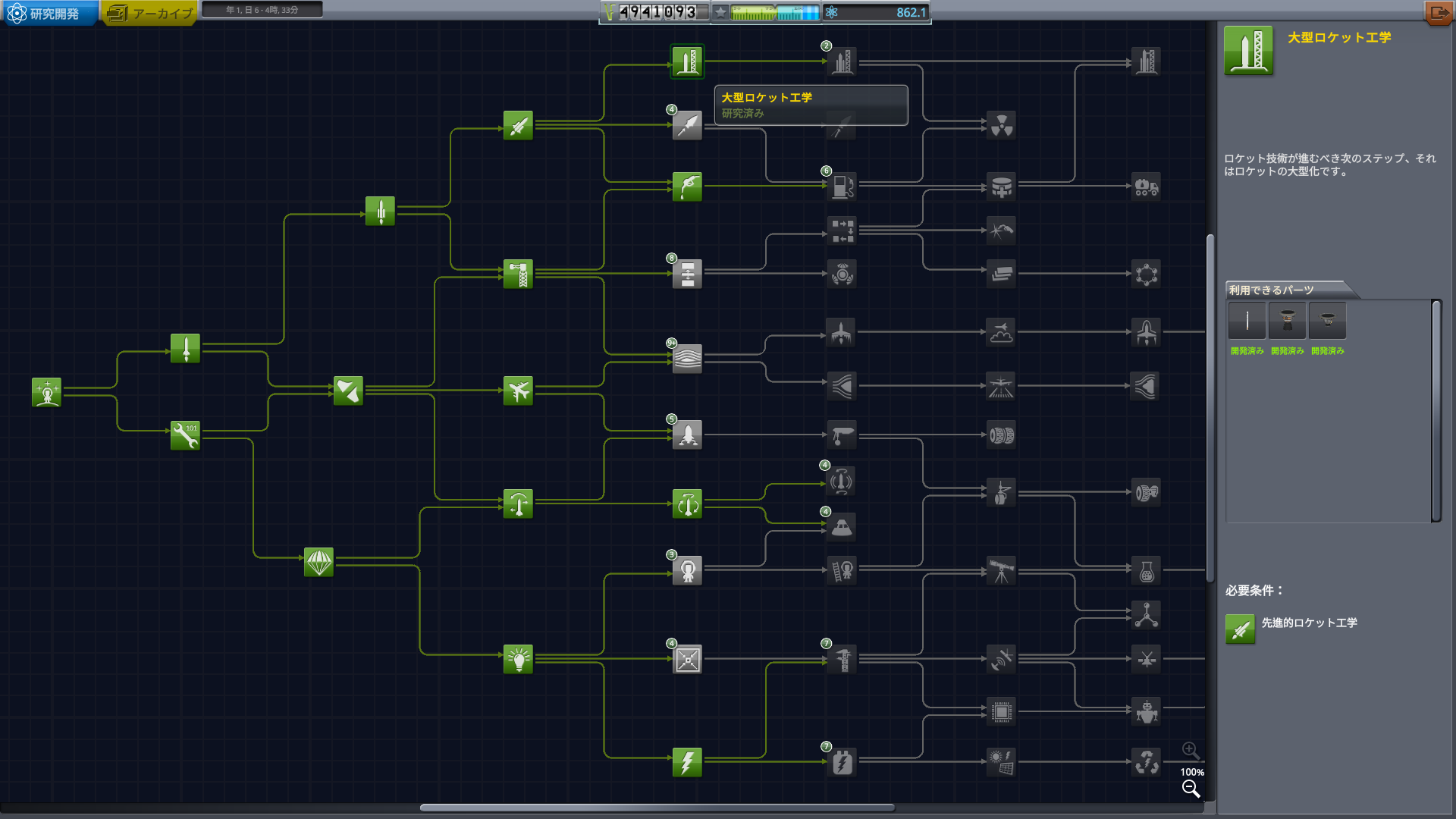
研究も4段目まで全て済み、5段目も主要な研究が完了したあたりになると、ムンに行けるようにもなる(今回は、6人の客を乗せてMun軌道周回)。
今回のロケット構成。
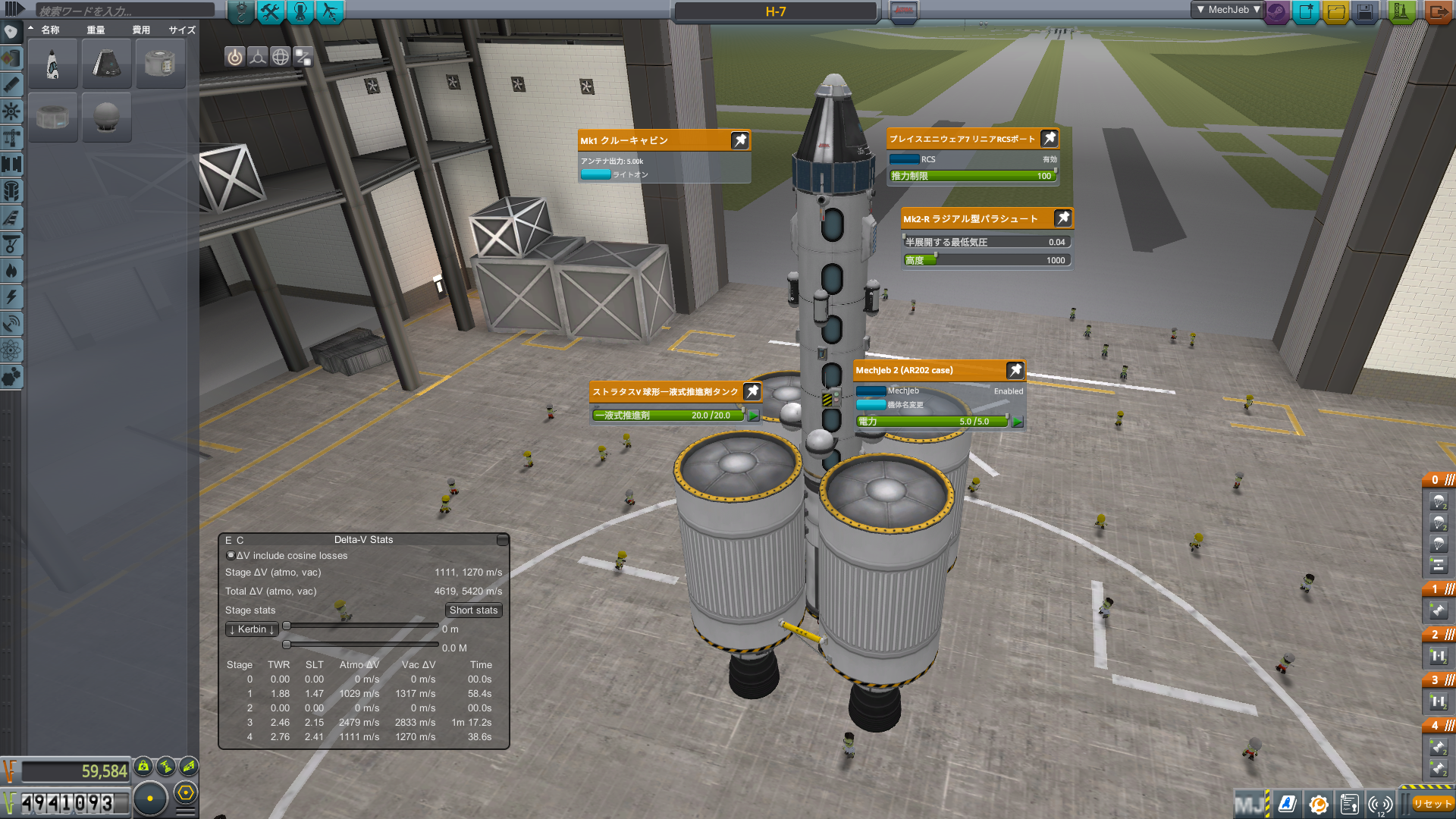
前回までと大きく違うのは、新たに『太陽電池パネル』を取り付けたこと。今回はムンまで行くのでこいつがいないと間違いなく電力切れを起こす。
次に『RCSポート』を8箇所(上に4箇所、下図に4箇所)取り付け、その燃料として『ストラタスV球形一液式推進タンク』を4箇所、クルーキャビン周りに設置している。
今回はぶっちゃけ重く、96tもある。(笑)
それをSAS(先進的インラインスタビライザー)だけで姿勢を制御するのは無理があるというもの。
したがって、RCSエンジンを取り付けるわけだ。
更にせっかくのムン往還計画なので、科学機器もしっかり取り付けていく。

下から見た図はこんな感じ。
『外部燃料ダクト(黄色い線)』を使ってアスパラガス接続をしている。
画面右下のアクションバーもよく見ておくこと。
4・側面のロケット4機点火
3・側面のロケットのうち2機を切り離し(この2機が先に燃料が無くなるため)
2・さらに残りの2機を切り離し
1・中央のロケット点火
0・中央の燃料タンクとエンジン切り離し、かつパラシュート展開
という流れで進む。
チート集によれば、
・Kerbin打ち上げから軌道周回まで3400
・Kerbin周回軌道からMun重力圏に捕まるまで860
・Mun重力圏からMun軌道周回まで310
ということだ。
つまり最低でも計4570m/sのΔVが必要となる。
で、帰ってくる分も含めれば5000は欲しいところ。
このロケットはKerbin大気圏内で4619、真空中で5420あるわけだから、まあ、5000ぐらいには達するだろうと適当に考える(笑)
あと、でっかい燃料タンクとエンジンを使っているので、しっかり『ストラットコネクター』で固めておくこと。
でないとロケットがグラグラする(笑)
打ち上げ!
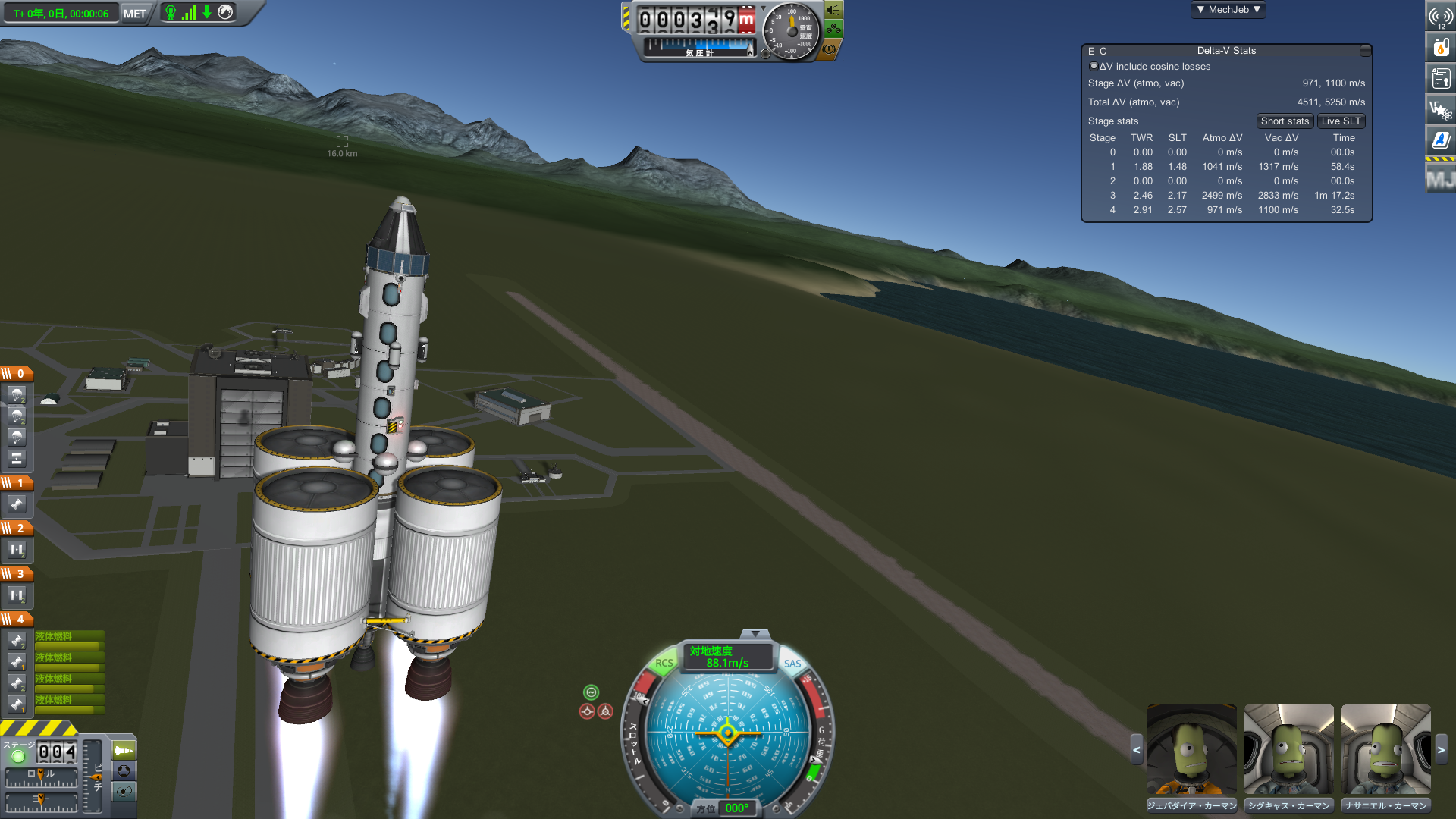
使い切った燃料から順次切り離していく
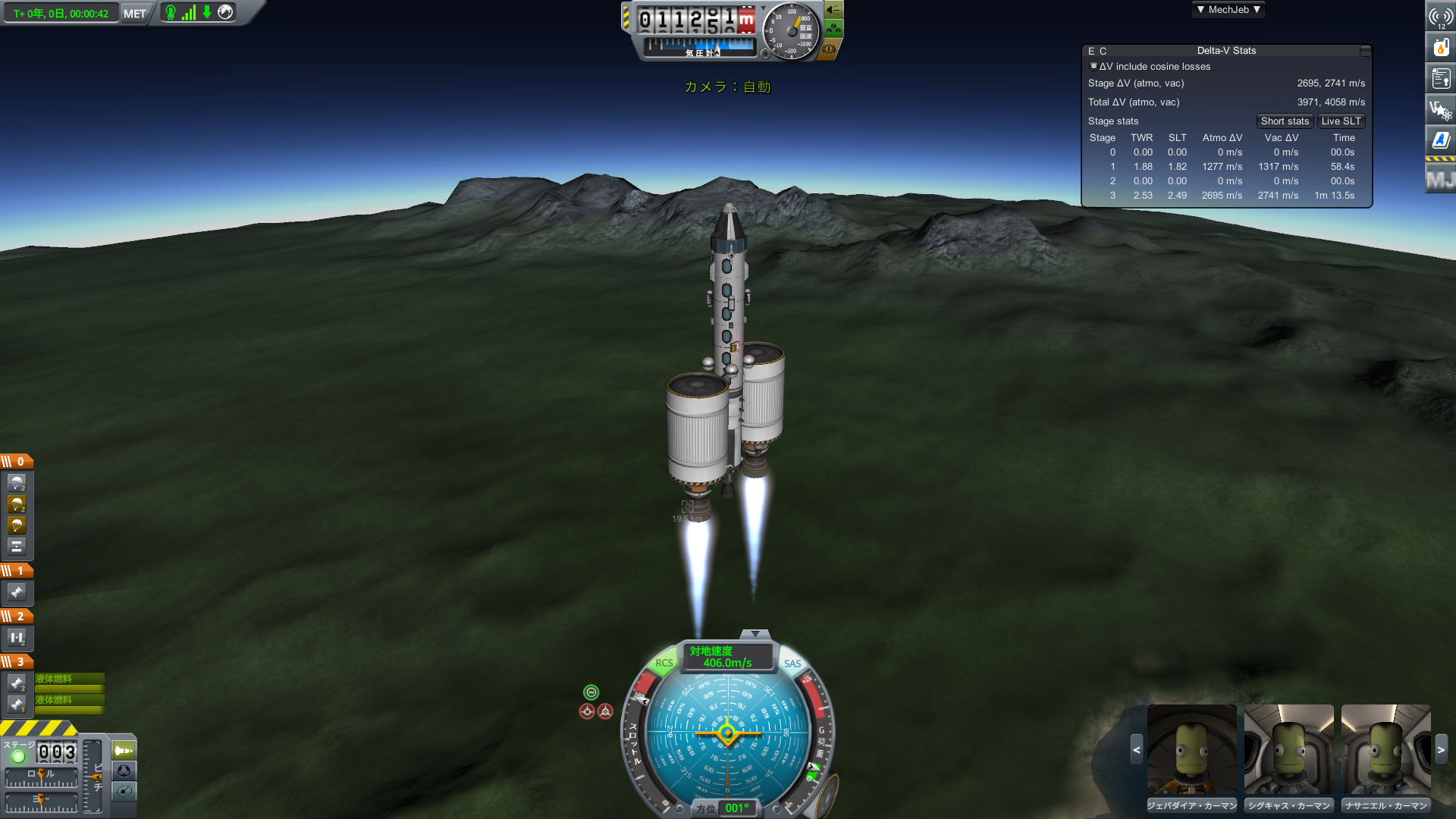
個人的には下図のように、ロケットが宇宙空間(高度70,000mあたり)に出たあたりで90度の方角に全力噴射すると良い感じに軌道周回に乗る。

途中、エンジンを切り離す。
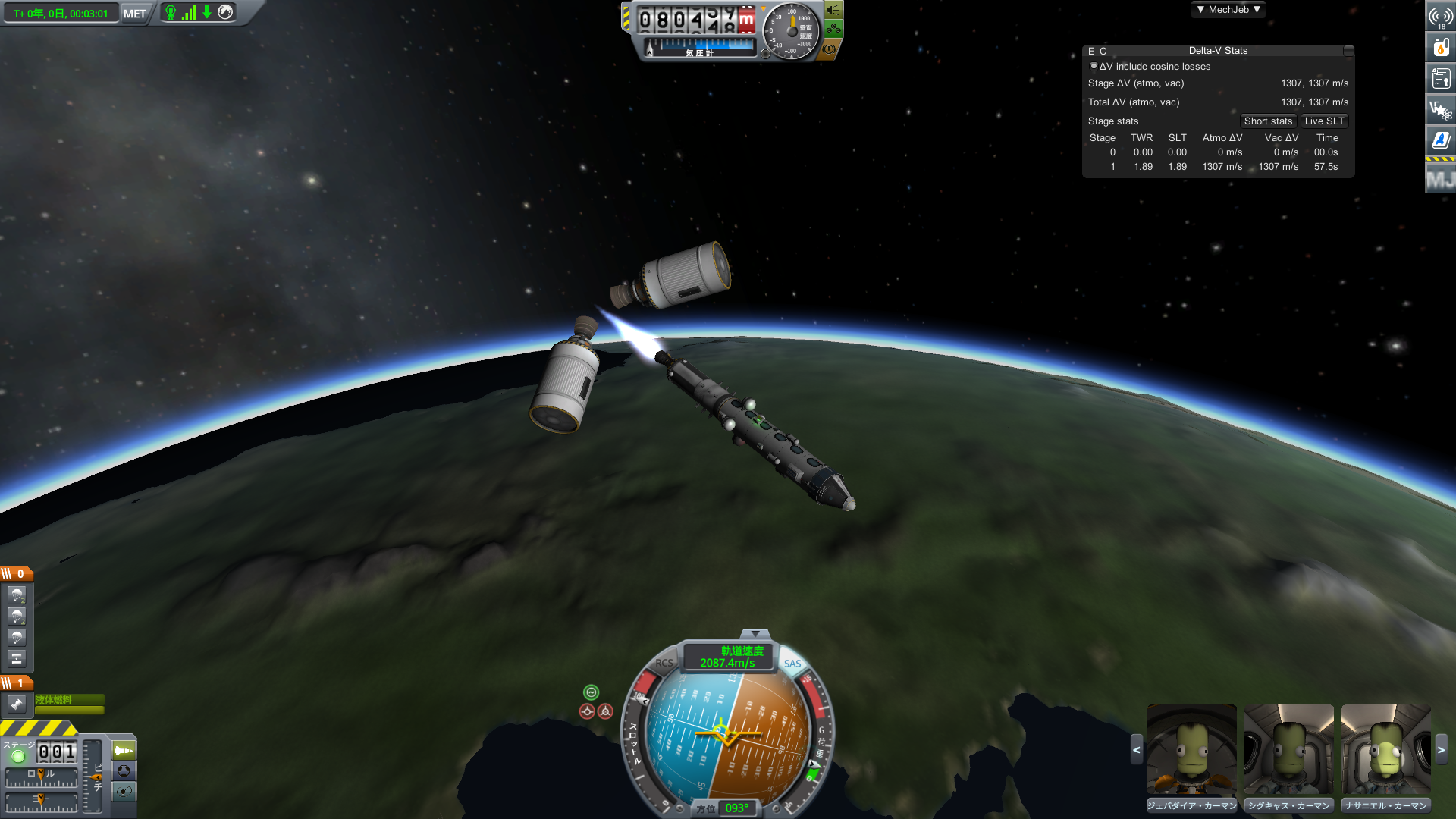
90度の方角に加速し続けて、近点と遠点のどちらともが宇宙空間に入った時点で加速をやめる。

次にムンに行くために『マニューバ』と呼ばれる機能を使う。
MechJeb先生の『Maneuver Planner』に頼るという方法もあるが、まだ自らの手で操縦したい(笑)
(KerbinからMunに移動する方法)
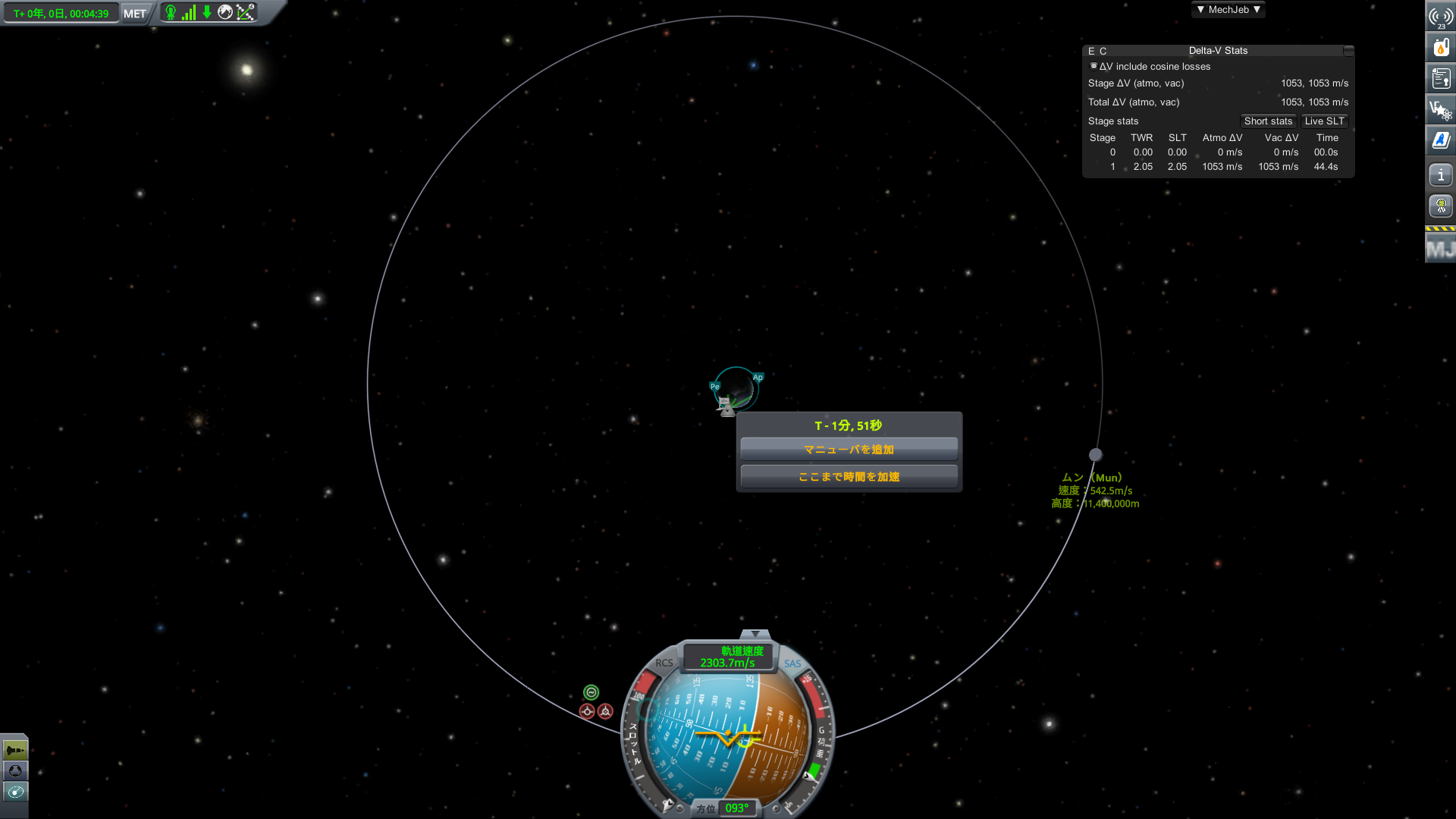
さて、ロケットは現在Kerbin周回軌道に乗っていて、ロケットの軌道は青っぽい線で表示されている。
一方、Munの軌道も灰色っぽい色で表示されている。
さて、KerbinからMunまでの距離が相当離れていることは分かると思う。
より具体的には、
『KerbinからMunに移動する間に、MunはKerbinの周りを約1/4移動する』
ということさえ知っていれば、実は大して難しい問題ではない。
上の画像だとMunは右にいる。
MunはKerbinを反時計回りに公転しているので、1/4移動した後は上に位置することになる。
『ロケットの軌道の遠点を、Munにぶつければ良い』ので『その反対側(将来近点になる場所)で順方向に加速してやる』
ということを覚えておくと、どこで加速すれば良いのか(軌道のどこで右クリックしてマニューバを追加すれば良いのか)が見えてくる。
で、良い感じにマニューバを操作すると、
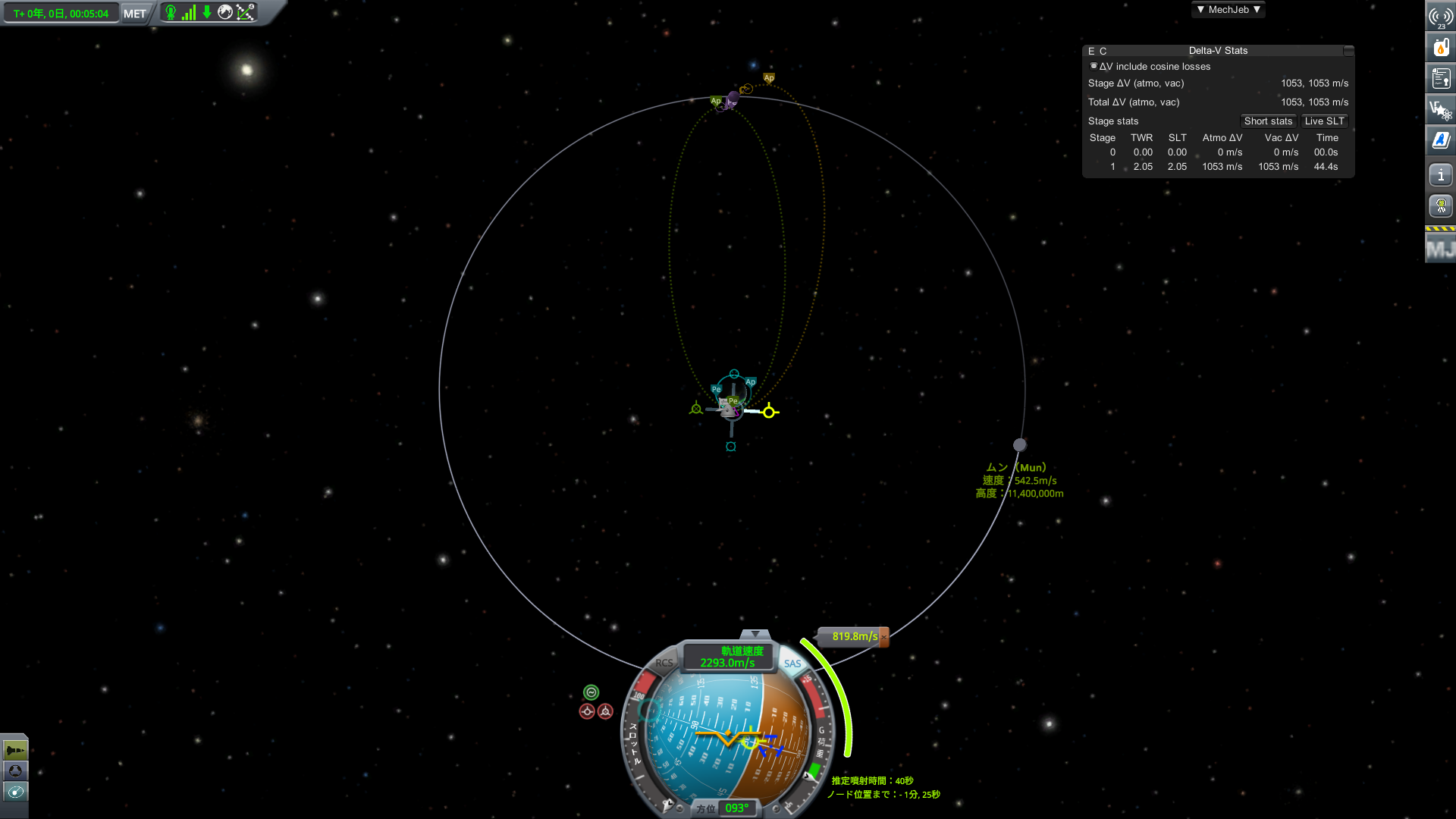
となる。
くれぐれも順方向以外のマークには触れないこと(笑)
私も含めて、初心者がマニューバで使って良いのは順方向だけだ(爆)
さあ、これで、下の球体に青いマークが出てくるはずだから、これに合わせて全力噴射すれば良いことになる。
ただし、画面下側にある『推定噴射時間』と『ノード位置まで』に気を付ける必要がある。
この例だと、推定噴射時間が40秒、ノード位置まで1分25秒とある。
推定噴射時間40秒の半分、20秒前から全力噴射するとまあまあ良い。
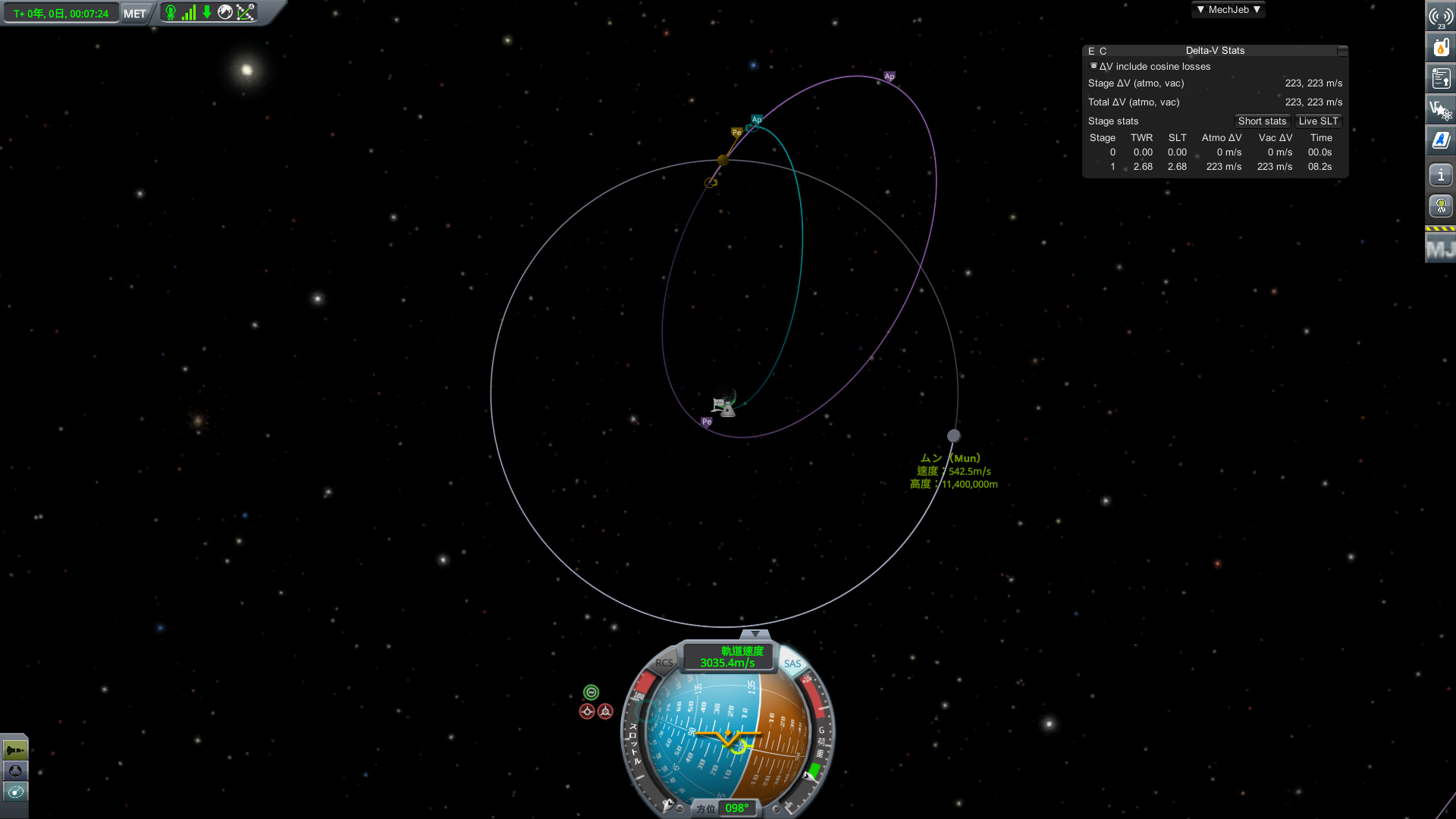
実際に噴射した結果(笑)
ものの見事にマニューバによる軌道線と違う結果となったが、まあ、ちゃんとムンの軌道には入っているので良しとする(笑)
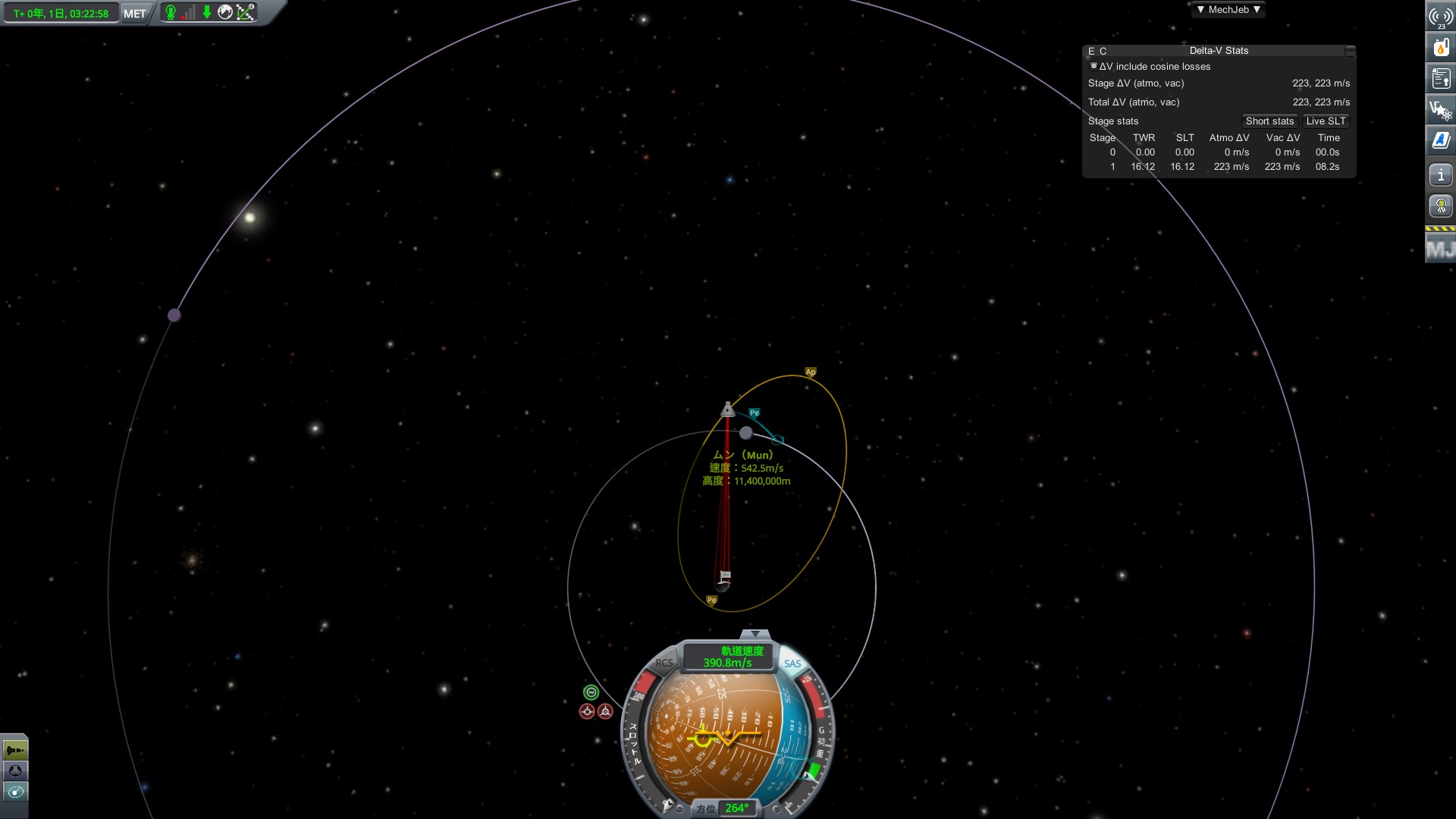
上の図は実際にムンの軌道に入ったところであるが、これを見る限り、ムンの軌道を周るのはほぼ一瞬(青い線)で、そのあと再びKerbinの重力圏に捉えられる(黄土色の線)ことが分かる。
が、これで良いのだ。
このような軌道予測線であれば、エンジンを噴射することなくKerbinの軌道に戻れる、つまり帰ることができるということなのだから素晴らしいのである。
何しろ残り燃料が8秒分しかないんでね…。
このMunの軌道にいる間に、必要なこと(サイエンスポイント稼ぎ)をすると良い。
また、上のKerbinから自分のロケットを結ぶ線が赤いことに気づいただろうか。
これは無線がヤバいぞという意味である(笑)
今回は有人だしサイエンスポイントも記録して持ち帰るパターンなので無線がダメになっても全く問題は無い。
が、例えば無人宇宙船であれば無線が届かない、というのはイコール操縦不能になるということである。
もし無人宇宙船(や無線で研究内容をKerbinに送信する)を企むのであれば、アンテナの取り付けは必須であるので注意しよう。

好きなことを終えたら、いよいよMunから離れ、Kerbinに戻る。
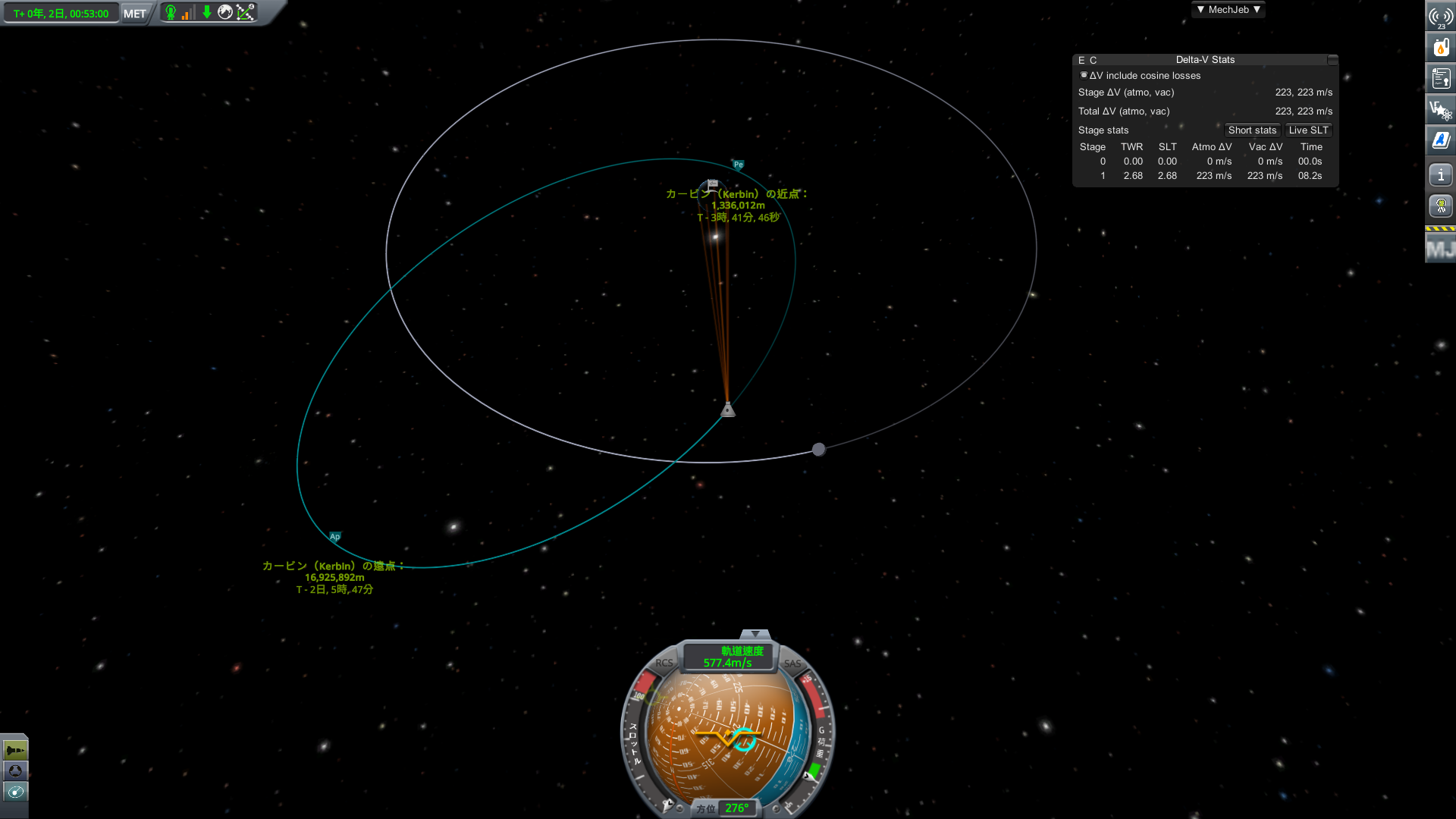
が、ただKerbinの軌道に戻っただけでは、近点が1,336,012mを指し示している。
Kerbinの重力は高度約70,000mまでしか及ばないのだから、最悪でも高度70,000mまでは高度を下げる必要がある。
で、近点の高度を下げるには『逆方向で噴射』すれば良いのだが、この図の時点で逆方向に噴射は厳しい。
燃料切れという万が一のこともあるので、遠点にいるときに逆方向を向いて噴射する。
これが最も効率良く高度を下げることができる。
再突入時も引き続き逆方向を向き、燃料の残りがまだあれば噴射して少しでもスピードを落とすと良いかもしれない(あまり意味はない)。

燃料が切れたら切り離すこと(重いと減速しづらい)。

今回は耐熱シールドがあって良かったね、…というか、側面がヤバい(笑)

まあ、何とか持った。


これで終わり。
いよいよ次はMun着陸なんだが、6人も客を乗せるのはちょっとキツいので、次はナシか、頑張っても4人かなあ(自信無い)。
研究が進めばねえ、6人も大丈夫だと思うのだが。
(補足)
もう少しだけ研究を進めると、
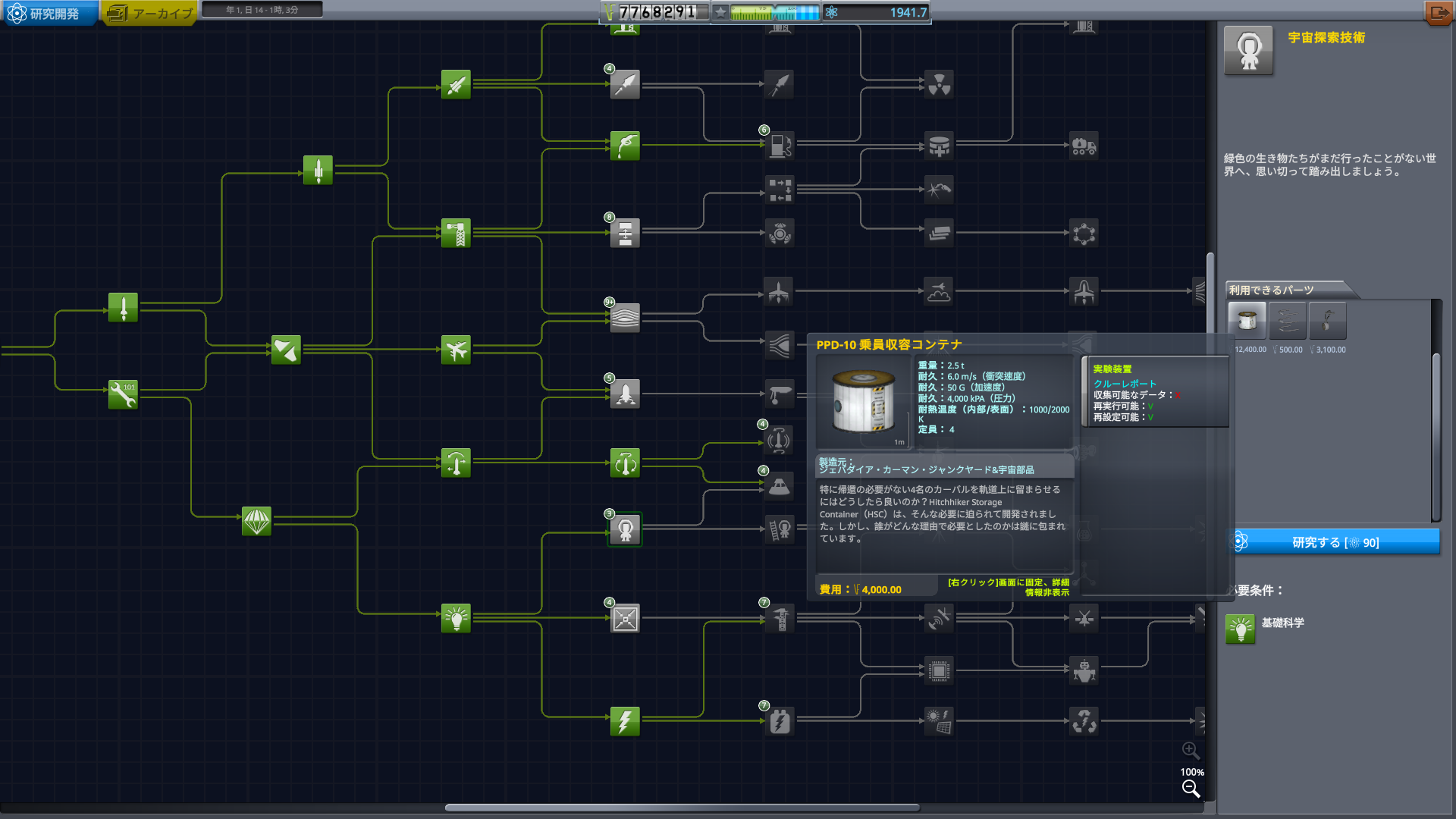
『PPD-10 乗客収容コンテナ』が解禁される。
が、コイツは地雷である(笑)
定員が4ということで「やった!」と思うんだが、何を隠そうこいつは脆いのである。
耐久が6.0m/sなのだ(泣)
確実に着陸時ぶっ壊れる(悲)
現在愛用中の『Mk1 クルーキャビン』であれば、40m/sまでであれば衝突しても壊れないので安心なのだ。
…まあ、40m/sで激突して、よく中身が大丈夫だなあとは常々感じるが(笑)
50m走を思い出して欲しい。
何秒かけて走りきるかを(笑)
それを考えると、40m/sというのがいかに馬鹿げているかご理解頂けるだろう(爆)
が、それほどの耐久性があるからこそ、容易に宇宙へ行けるのである。
やはりゲームだよなあ。
というか、そもそもKerbinは地球じゃないからね、重力も地球と比べればずいぶんと弱く設定してあるし。
地球だとゲームにならないからなあ(笑)

