とりあえず本編ではその10までにKerbinからMinmus経由Mun往還ロケットを打ち上げるところまで行ったので、そろそろMODを入れたいと思う。
というわけで、まずは入れるMODを紹介することにする。
まずは既に導入済のMechJeb先生だ。
※ 全てを理解しているわけではなく、使う機能の説明しか出来ないことを始めにお詫びする。
※ あと日本語は適当訳である。
※ ランデブーとドッキングはまだ。何しろ本編がまだそこまで進んでいない(笑)
Mech Jeb 2.7.3
MechJebとはチートである(爆)
ΔVといった欲しい情報からオートパイロットまで、何でもこなす万能MODである。
乱用するとゲーム性を失う(笑)
(ロケット組立棟)
MechJeb先生を使うには、ロケット組立棟にてMechJeb 2を取り付ける必要がある。

すると画面右上にMechJebのメニューバーが表示されるはずなので、必要な画面を開けば良い。
1.Vessel Info(船体情報)
| Max acceleration | 最大加速度 | |
| Current acceleration | 現在加速度 | |
| Max thrust | 最大推力 | |
| Vessel mass | 船体質量 | |
| Surface TWR | 推力重力比 | |
| Crew capacity | 定員 |
ぶっちゃけ、あまり見ない。
2.Delta-V Stats(ΔV情報)
| TWR | 推力重力比 | 原則、最終ステージは1を超えていること! |
| SLT | 海面時推力重力比 | Sea Level TWR |
| Atmo ΔV | 大気圏内ΔV | |
| Vac ΔV | 真空中ΔV | |
| Time | 燃焼時間 | スロットル100%で。 |
よく見るのは、Total ΔV vac と、各StageのVac ΔVぐらいである。
KerbinからMunやMinmus往還船を設計するなら『Total ΔV vac』が 9,000m/s 以上を目標に設計するのが良い。
KerbinからMunへの往還はその8、Minmus往還はその9、Minmus経由Mun往還はその10で詳しく説明したので是非ご覧頂きたい。
(ロケット発射場)
3.Ascent Guidance (打ち上げ誘導)
自動で打ち上げて周回軌道まで乗せてくれるシステム。
あまり使わないので大した説明はできない。
というのも、こいつを使うには様々な前提条件というか、制約があるのだ。
簡単にいえば、真っすぐ飛び、素直なロケットである必要がある(爆)
バランスが崩れていたり、RCSやSASの姿勢制御に鈍感にしか応えないロケットではダメなのだ。
素直なロケットとか、ゲームでは作らないからなあ(笑)
具体的にいうと、下の図のようなロケットを素直なロケットという(笑)

もうね、どこにでもあるようなロケットだよ()
さて、どうしても使いたいとき(ラクをしたいとき。カップラーメンのお湯を沸かしたいときなど)に見るべき項目のみ説明を入れる。
| Orbit altitude | 目標軌道高度 | デフォルトは100kmのはず。 |
| Orbit inc. | 目標軌道傾斜角 | Minmusに行くなら6度。 |
| Autostage | Stage自動移行 | デフォルトはONになっているはず。 |
| Auto-warp | 自動時間加速 | デフォルトはONになっているはず。 |
| Edit ascent path | 打ち上げ軌道の編集 | これは必ずクリックして編集すべし。 |
Kerbin軌道は最低約70kmではあるのだが、Ascent guidanceを使うならデフォルトのままが良い。
基本的には何もいじらず、デフォルトのままで。
ただし、Edit ascent pathだけはクリックして軌道を編集した方が良い。
というのも、デフォルトのままだと、すぐに90度の方角を向こうとするのだ(笑)
バリバリに効く姿勢制御装置を組み入れているのであれば別に構わないのだが、そうではない場合が多いのだから、せめて高度〇〇kmや秒速〇〇mまでは姿勢を変えないよう、AltitudeやVelocityを変えておく必要がある。
何ならばAltitudeもVelocityも右端で良いぐらいだ(その分燃料は無駄に食らうので余裕のあるΔV設計が必要になってくるが)。
あとは普通のロケットを打ち上げるのをこいつは想定しているので、例えば第一段をメインセイルなど推進力の強いエンジンにして、第二段をプードルなどの非力エンジン(大気圏抜けてしまえば時間はかかっても燃費の良いエンジンにしたいと思ってしまう私のような人)にしてしまう場合は要注意、というかしない方が良い。
軌道周回に入るためのマニューバが自動で作られるときのエンジン基準でマニューバが設定されるから、といえば分かってくれるだろうか。
どうしてもしたいなら Skip Circularization にチェックを入れて、軌道周回は手動でやるしかない。
極端なロケットはダメ、ということだけ念頭に置いておこう。
(各種情報)
MechJebで得られる情報は先に説明したDelta-V StatsやVessel Infoだけではない。

4.Orbit Info(軌道情報)
大事な情報ばかりだが、Mキーでオービタルマップの画面に行けばAPやPEは分かることなので、あまり見ない。
| Orbital speed | 軌道速度 | |
| Apoapsis | 遠点の高度 | 略してAP(軌道の最高高度) |
| Periapsis | 近点の高度 | 略してPE(軌道の最低高度) |
| Orbital period | 周回時間 | 軌道を一周するのにかかる時間 |
| Time to apoapsis | 遠点までの到達時間 | |
| Time to periapsis | 近点までの到達時間 | |
| Inclination | 軌道傾斜角 | 軌道がどれだけ傾いているか |
| Eccentricity | 離心率 | 0なら真円、1未満なら楕円 |
5.Surface Info(その他情報)
これもあまり見ないなあ。
| Altitude (ASL) | 海抜高度 | Above Sea Level |
| Altitude (true) | 対地高度 | |
| Pitch | 仰俯角(-90~+90) | 真上90 水平0 真下-90 |
| Heading | 方位角(0~360=0) | 北0 東90 南180 西270 |
| Roll | 転角(0~360=0) | |
| Surface speed | 対地速度 | |
| Vertical speed | 対地水平速度 | |
| Surface horizontal speed | 対地垂直速度 | |
| Coordinates | 座標 |
(マニューバプランナー)
MechJebで最も使うのが、このManeuver Plannerである。

よく使っているものから説明する。
6-1.Hohmann transfer to target(ホーマン遷移軌道)
MunやMinmusなど衛星に行きたいときに使う
正確にはwikipediaにもある通り、同一軌道面にある2つの円軌道の間で軌道を変更したいときに使う。
KerbinでいえばそれはMunでありMinmusなのだ。
更に太陽軌道まで出れば他の惑星にホーマン遷移軌道を取ることはできるし、
例えばJoolにいるときであればLayhe、Vall、Tylo、Bop、Polにホーマン遷移軌道を取ることができるという意味である。
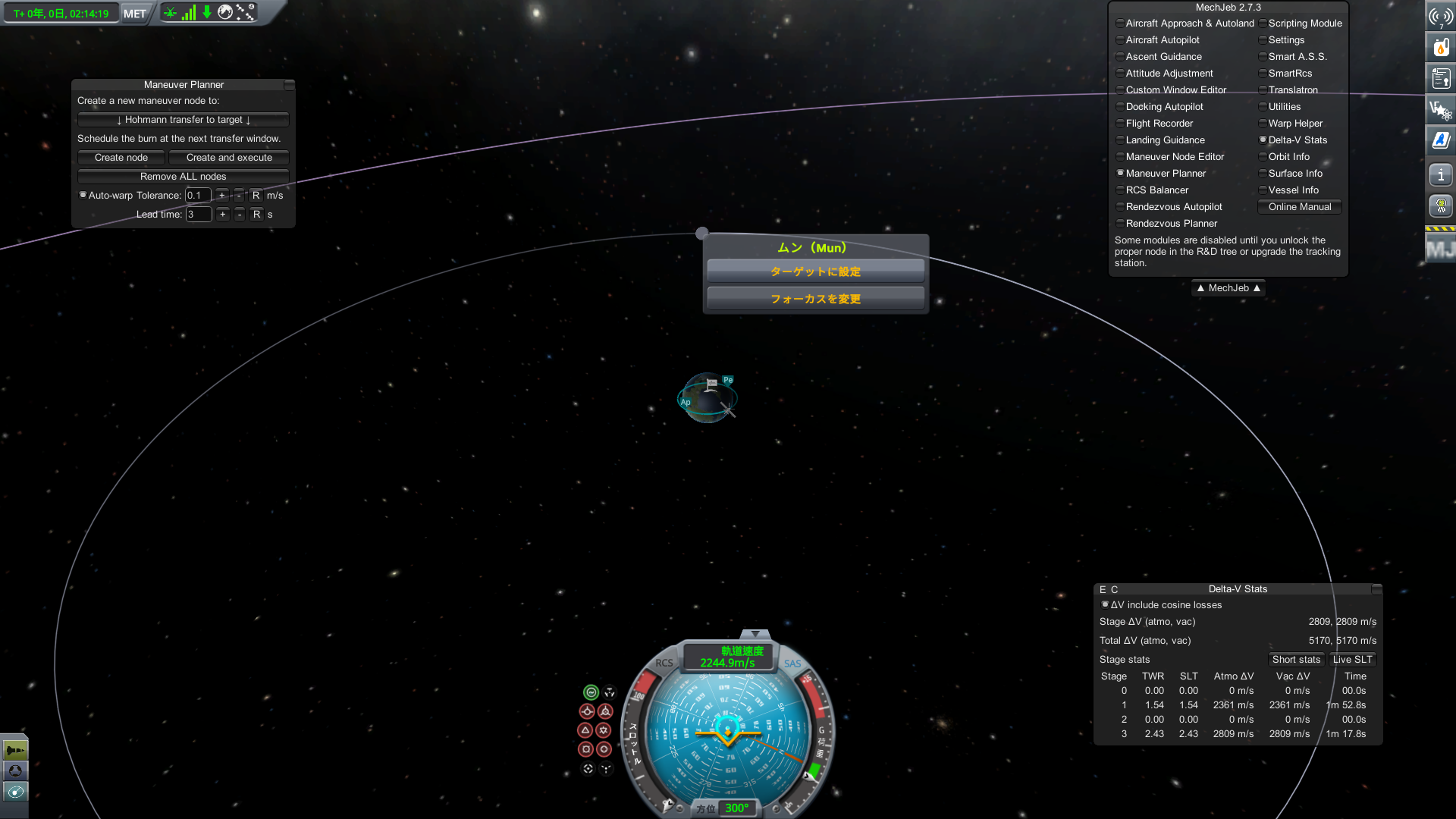
使い方は上の図のように、行きたい惑星または衛星をターゲットに設定し、Maneuver Plannerの画面からHohmann trasfer to targetを選択。
| Create node | マニューバを作成するだけ |
| Create and execute | マニューバを作成し、かつオートパイロットに入る |
| Remove ALL nodes | 全てのマニューバを削除する |
大抵の場合はCreate and executeをクリックすれば、あとはしばらく待つだけとなる。
6-2.match planes with target
ターゲットと同じ軌道傾斜角にしたいときに使う
以下は、各惑星と各衛星の軌道傾斜角だ。
| Moho | 7 | ||||
| Eve | 2.1 | Gilly | 12 | ||
| Kerbin | 0 | Mun | 0 | Minmus | 6 |
| Duna | 0.06 | Ike | 0.2 | ||
| Dres | 5 | ||||
| Jool | 1.304 | Bop | 15 | Pol | 4.25 |
| Eeloo | 6.15 |
※ Joolのその他の衛星の軌道傾斜角は0度またはほぼ0度である。
Duna程度の軌道傾斜角であれば無視しても良いのだろうが、基本的には軌道傾斜角を合わせてからホーマン遷移軌道を取る。
このモードだと、いちいちターゲットの軌道傾斜角が分からなくても合わせてくれるから便利なのである。
6-3.change inclination
軌道傾斜角を指定の角度にしたいときに使う
ターゲットできるものが相手なら match planes with target で良いのだが、例えば偵察衛星を極軌道(90度)に投下したいときなどは、このモードで直接角度を指定してやる。
6-4.circularize
軌道を真円にしたいときに使う
近点と遠点の高度を同じにしたいときに使うモード。
| at the next apoapsis | PEをAP(遠点)に合わせる |
| at the next periapsis | APをPE(近点)に合わせる |
| at an altitude | 指定の高度に合わせる |
| after a fixed time | 指定された時間後に居る高度に合わせる |
6-5.その他
(advanced) transfer to another planet
他の惑星に行きたいときに使うのだが、私はあまり使わない。
Kerbinから一度太陽軌道に出てchange inclinationすればHohmannが使えるわけだからね。
それでも全自動は魅力なので、使うときが全くないわけではない。
何かほかの作業をしなければならないときは、重宝する(笑)
(着陸時)
7.Landing Guidance (着陸誘導)
惑星や衛星に着陸したいときに使う
これはかなりのチートだと思う(笑)
個人的にはゲーム性を失うのであまり使わないのだが、一度でも使えば時々使ってしまう。
まさに悪魔の誘惑(笑)
ただ、Land at target(指定された着地点に着陸)はあまり使えない気がするので、Land somewhere(どこでも良いから着陸)でお任せする。

これぐらい離れているところからでもオッケー。
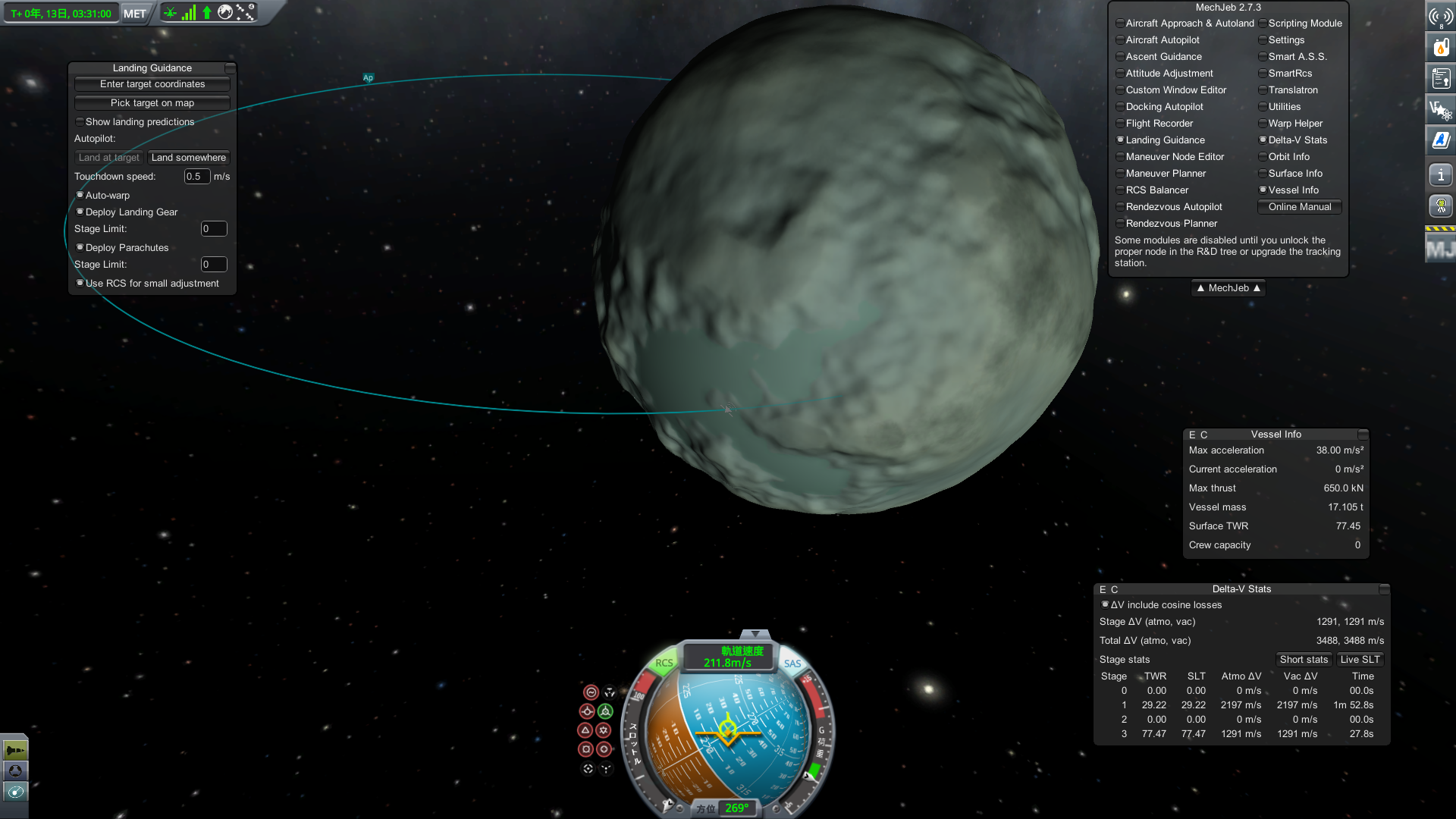
とはいえ夜側に着陸されても困るので、とりあえず上の図のように着陸軌道(高度0mを昼側)に乗せてからLand somewhereをクリックすると良い。これならsomewhereとはいいながら、だいたい思っているところに着陸してくれる。
(用語解説)
1を超えないと上昇しない、という意味。
気にするのは離陸時ぐらい。離陸した後はどんどん船体質量は減少する(燃料消費するから)のだから、離陸時に1を超えていれば離陸後に1を下回ることは普通はないわけだからね。
エネルギー量のこと。
これだけのΔVがあればここまで行けますよーという意味。単位はm/s。