人工衛星を打ち上げる。
(と、その前に寄り道)
EULA改悪で悪評がすっかり定着してしまったKSPであるが、久々に起動したら
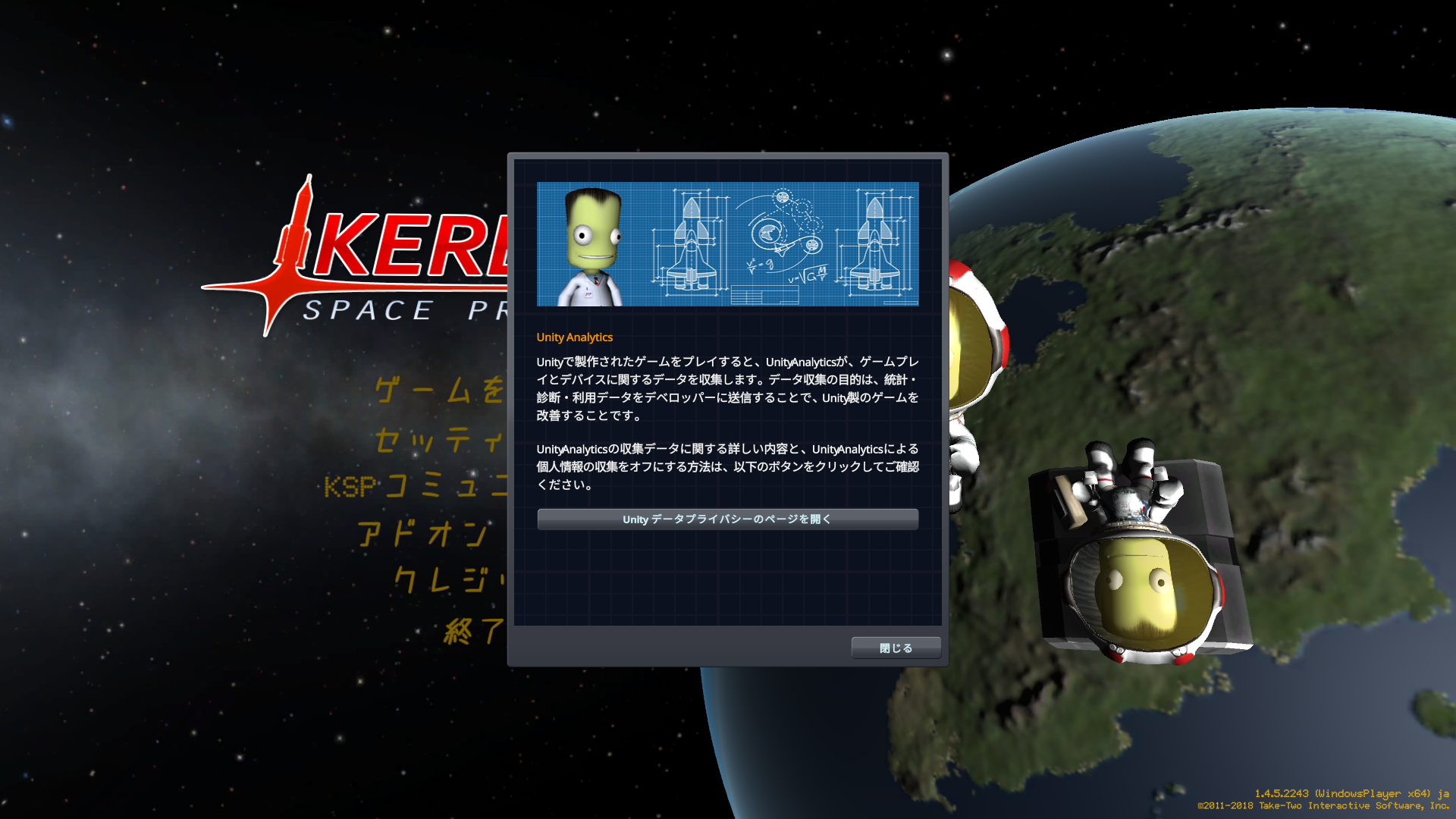
全ては Unity Analytics のせいなんだといわんばかりの画面が(笑)

も併せて読む限りはオプトアウト(個人情報提供の停止)ができるっぽい。
うーん、で、実際のところどうなのよ?と思わないでもない。
単純に私の英語力が無いだけなんだが(機械翻訳して読んでも分からねぇ(笑))
と、そんなことはどうでも良いのだ。
早く打ち上げなければ。
ロケットが私を待っている(爆)
(導入したMOD)
今回からはMechJeb先生以外にもMODを導入する。
MOD自体の入手はおすすめも含めてGoogle様で検索すると良い。
とりあえず、ダウンロードはここが良いかな。
MODの導入についてはとりあえず、GameDataフォルダにぶち込めば良い。
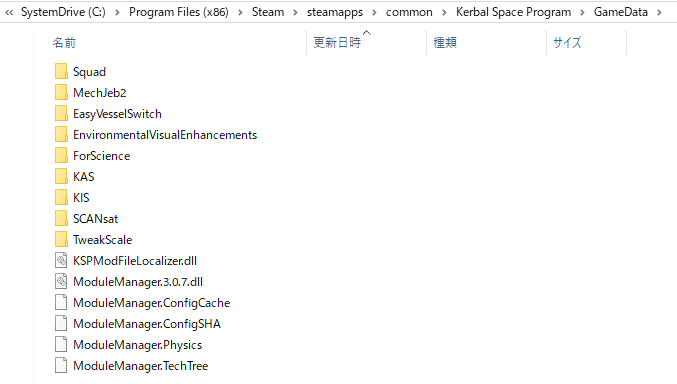
デフォルトだと上図のところだと思われる。
以下、簡易説明。
1.Squad
これはMODではないので割愛。
2.MechJeb
言わずと知れたチート(笑)
ΔVの計算からオートパイロットまで、必要な情報からお手軽操作までを提供してくれる。
乗り換えMOD。すっごく重宝する。これないと複数の機体を打ち上げて相互に操作するとき超ストレス(笑)
4.EVE
素晴らしい雲になる(笑)
サイエンスポイントの獲得を自動的にやってくれるラクチン化MOD
EVA(船外活動)で緑が活躍できるようになる(笑)
7.SCANsat
レーダー(笑)
パーツ巨大化(笑)
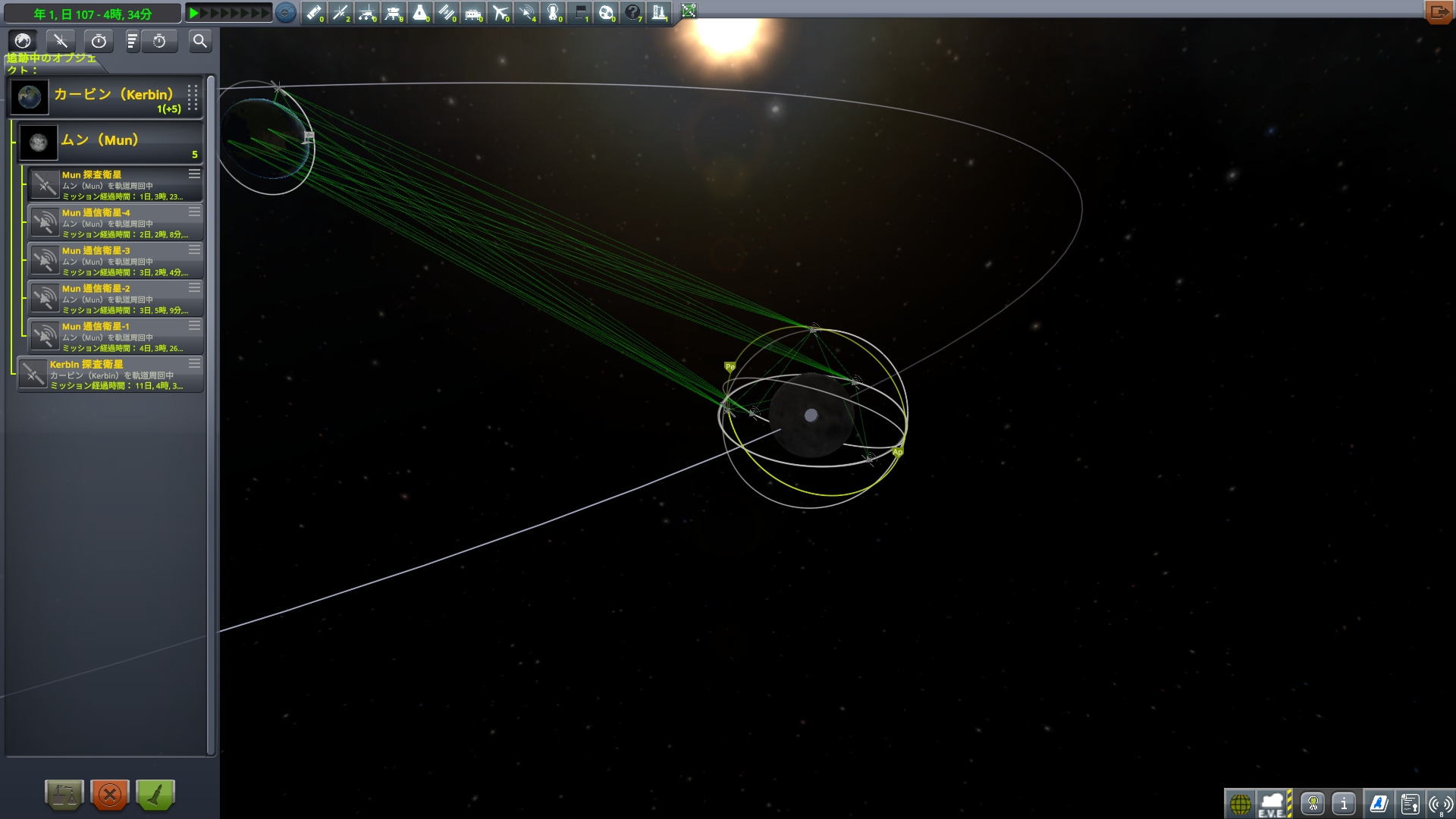
9.TrackingStationEvolved(13機目以降で追加したMOD)
トラッキングステーションの表示を惑星ごとなどにまとめてくれる。
使用例
10.StockVisualEnhancements (SVE)(13機目以降で追加したMOD)
Kerbinがキレイになる(笑)
整形前後(笑)
11.Kerbal Planetary Base Systems (13機目以降で追加したMOD)
地上基地用のパーツが追加される。
これがないと地上で楽園を作ろうなどとは全く思わない(笑)
(人工衛星組立)
人工衛星というか、SCANsatを導入したのでまずは探査衛星を組み立てる。
構成はこんな感じ。

人工衛星とキャリアロケットは別々に設計する。
とりあえず、この人工衛星の名前をJ-1ということにする。
ちなみにこのスキャナーやらセンサ―は特に考えずに付けている。
だってたくさんつけてあった方がカッコいいじゃん!(笑)
なお、エンジン部分はイオンエンジンを積んでいるのだが、イオンエンジン自体は小さいため、TweakScaleで大きくしている。
別に大きくしなくても人工衛星は宇宙空間でのみ軌道制御するので、TWRなんて関係ない。
ただのデザインだ(笑)
ああ、あと関係ないとはいえ非力だと軌道変更に時間がかかるのは確かなので、やっぱり大きい方が良い。
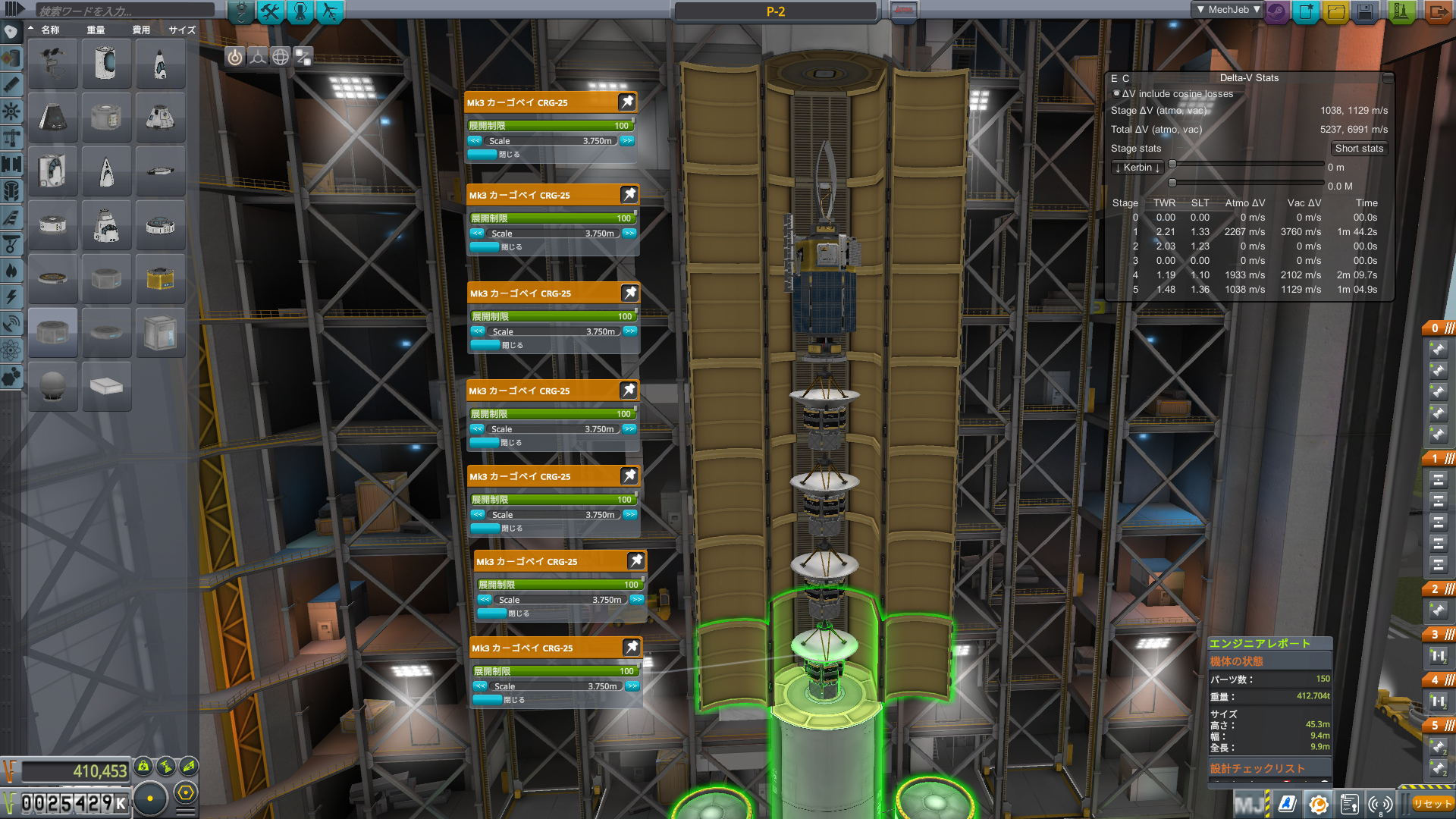
(ロケット組立)

で、作った人工衛星をキャリアロケットに詰め込む。
なんと、高さ35m超!(呆)

まずは上部構成。
何だかHECがキモい。
HEC2ではなくOTOKO2の方がスマートで良いかもしれない。
どうせSASには期待できないわけだし(超重量のため、姿勢制御は16機のヴァーナーエンジンで頑張る)。

で、カーゴベイの中に作った人工衛星をマージする。
カーゴベイの種類はCRG-100である必要はないのだが、この人工衛星はそれなりの高さがあるので、CRG-50では入りきらない。
CRG-50とCRG-25の組み合わせならいける。
が、面倒だったので大は小を兼ねると思い100をチョイスしている(笑)
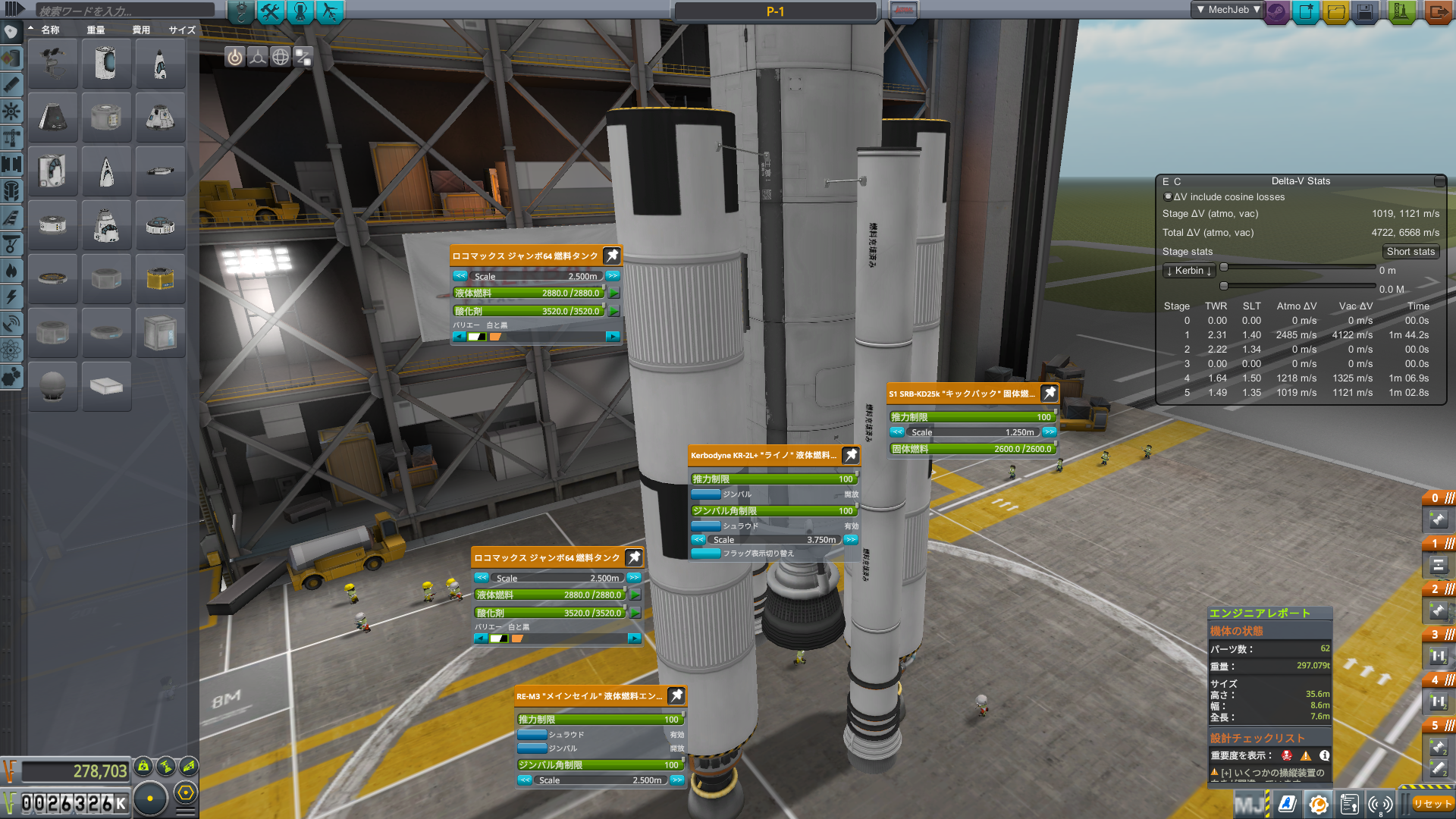
下部構成はこんなもん。
アスパラガス接続はしていないので、かなりスッキリとしたstage構成でもある。
固形燃料キックバック2基と、メインセイル2機が大気圏脱出用の第一段エンジンである。
中央部のライノ1機が、宇宙空間用の第二段エンジンである。
ライノエンジンは大きいから力があると思うかもしれないが、大気圏内では燃費が悪すぎるのでこのstage構成(大気圏内でライノは使わないよう)にしている。
これでΔVは6568m/sである。
MunだろうがMinmusだろうがどこでも自由に行けるだけのΔVを確保した(笑)
が、まずはKerbinでテスト飛行である(爆)
というか、MunやMinmusであれば、まず初めに通信衛星を打ち上げるのが先かなとも思うので。
(打ち上げ)

Mk3 to 2.5m 変換スラントアダプターは偏った形をしているので安定飛行できるかと不安になるが、意外と安定して打ち上げられる。

問題なくKerbinの軌道周回に入ったら、いよいよ切り離しである。
上図のようにカーゴベイを開いたら、キャリアロケットと人工衛星をつなぐセパレータを切り離す。


セパレータを切り離したら、速やかに人工衛星をALTキーを押しながらクリックして、視点を人工衛星に切り替える(EasyVesselSwitch MODの効果)。
うん、やっぱり操作系MODはラクになるわ(笑)

切り離しが済んだら、人工衛星のエンジンを始動させ、キャリアロケットを距離を取ってから、極軌道に軌道を修正する。
うん、やっぱりMechJeb先生はチートだわ、チーターだわ(笑)
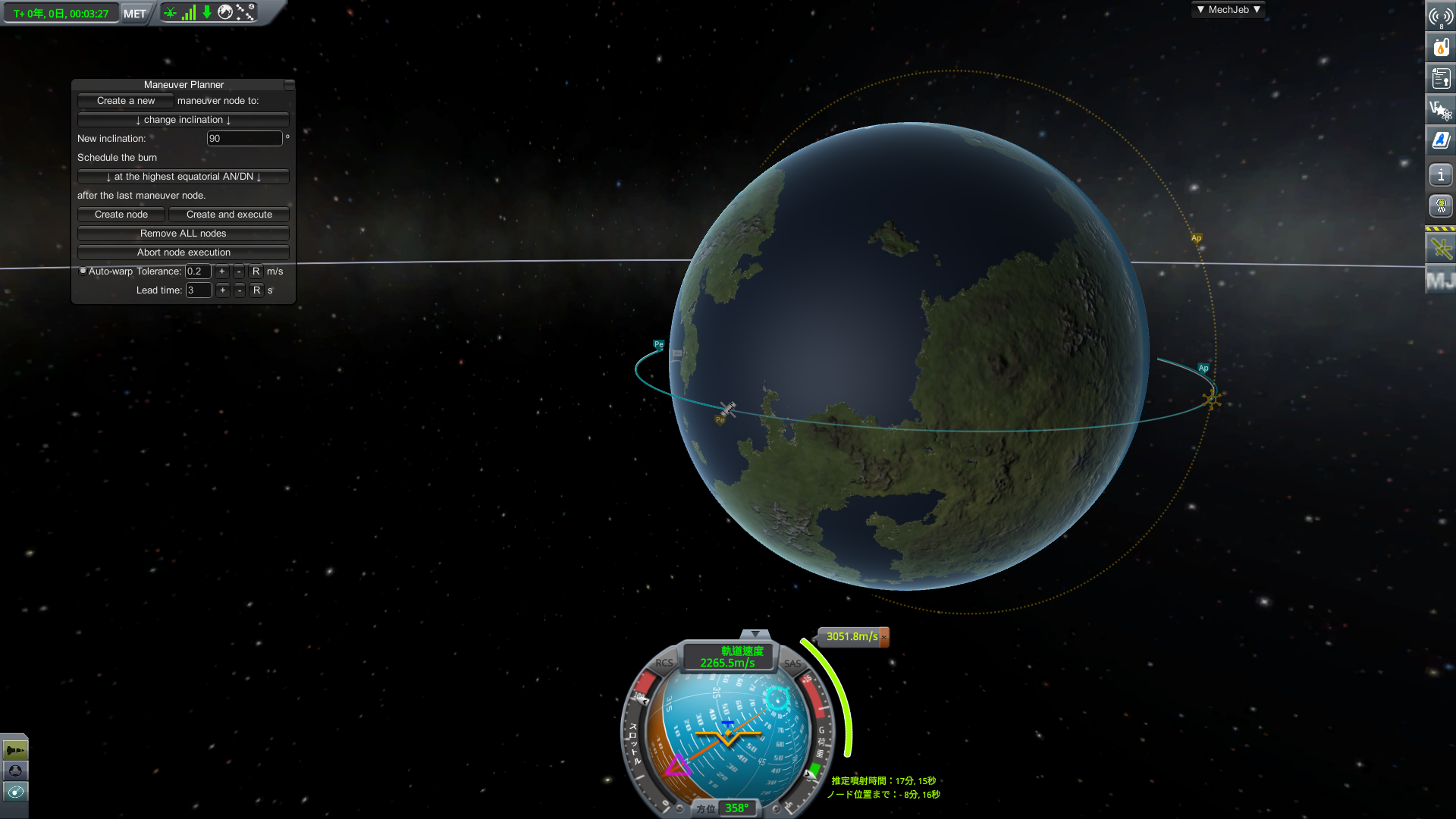
失敗した。
いや、正確にいうと失敗ではないのだが、上図の『推定噴射時間』が17分15秒となっている。
…そう、極軌道の修正にそれだけの時間がかかるということだ。
ALTキーで時間加速して4倍速にしてもそれなりの時間がかかるので、キャリアロケットで極軌道まで修正すれば良かった(後悔)
その後。
噴射を始めた途端1時間に延びた。
(やり直しやがった)
そうだ、最初っから0度の方角を向いて飛べば良かったんだ(いつもは90度)。
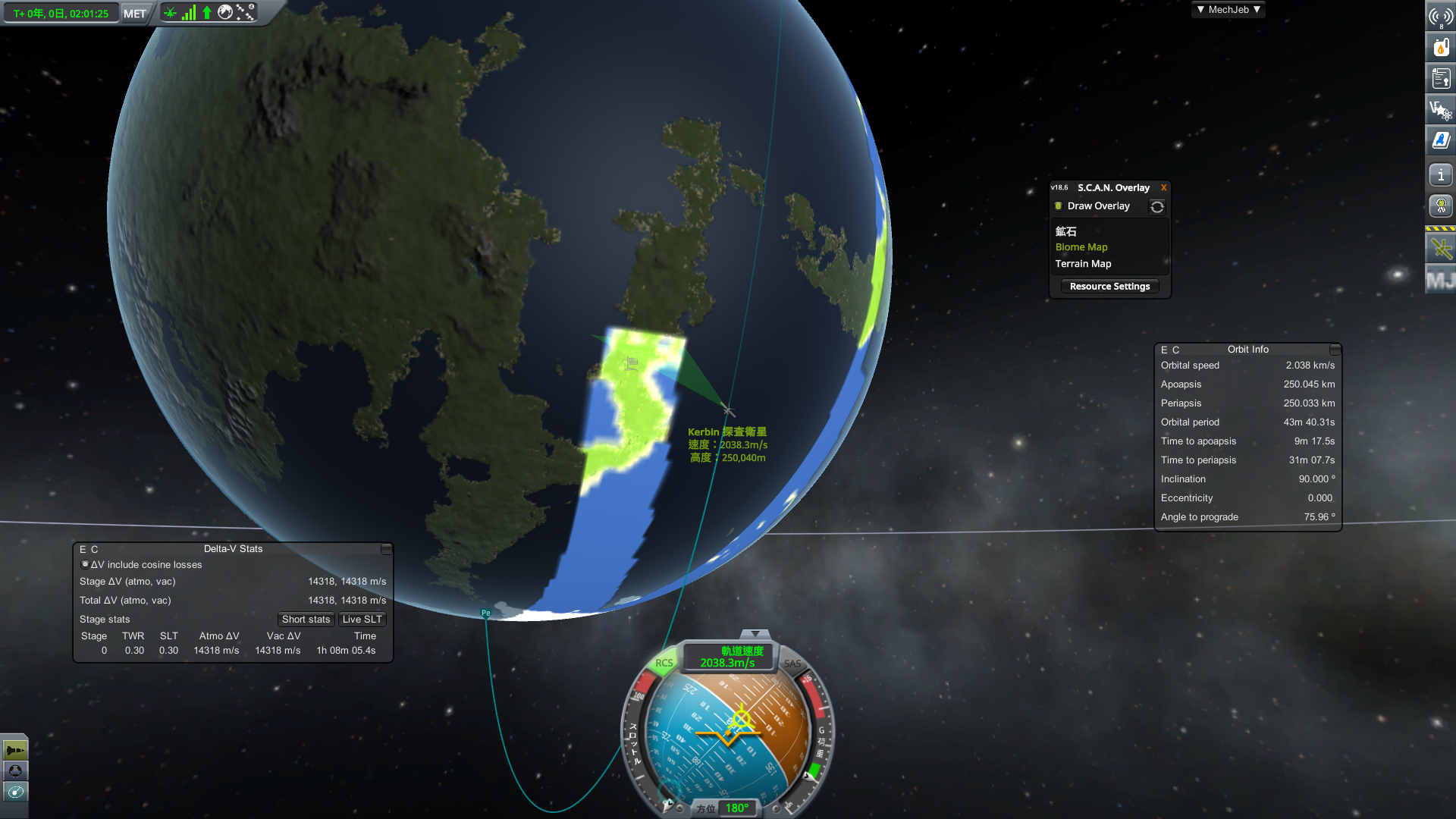
というわけで、無事極軌道に人工衛星を投入することに成功。
Orbit Infoの通り、250km軌道にした。
これはバイオームを探査するSCAN Multispectral Sensorの最良が高度250kmという情報をwikiより頂戴したためである。
標高なんかどうでも良いんだよ、肝心なのはバイオームなのだよ。
…って、とかいいながら、For Scienceを入れてあるから、バイオーム変わったら自動的にサイエンスしてくれるんだよな()
Kerbinで鉱石掘るわけでもないし、…ぶっちゃけテスト飛行以上の意味がなかった(汗)
ちなみに無人機で行く理由。
トラッキングステーションで追跡終了しても問題が無くなる(爆)
だから、キャリアロケットのΔV、6568m/sの全てを、片道燃料に使えることを意味する。
(TIPS)
その1
ロケットや人工衛星の名前やアイコンを変える方法。

パーツ(制御装置)を右クリックして出てくるメニューの中から『機体名称の変更』をクリック。
これで名前やアイコンを変更することができる。
その2
追跡終了(強制終了)とは何か?

トラッキングステーションから、ミッションを強制終了(ロケットの追跡を終了)することができる。
デブリなどでトラッキングステーションがごちゃごちゃしても、こいつを使えば

スッキリできる♪