無人惑星探査機(失敗編)
ムンやミンマスは衛星だ。
惑星じゃない。
いよいよだ!
そう、いよいよ他の惑星へ行くときがやってきたのだっ!
さて、技術の整っていなかった頃(第5回)は、まさかの電波が届かない事態に陥ってロケットを放棄してしまったので、今回はしっかり作りこんで他惑星に送り込む。
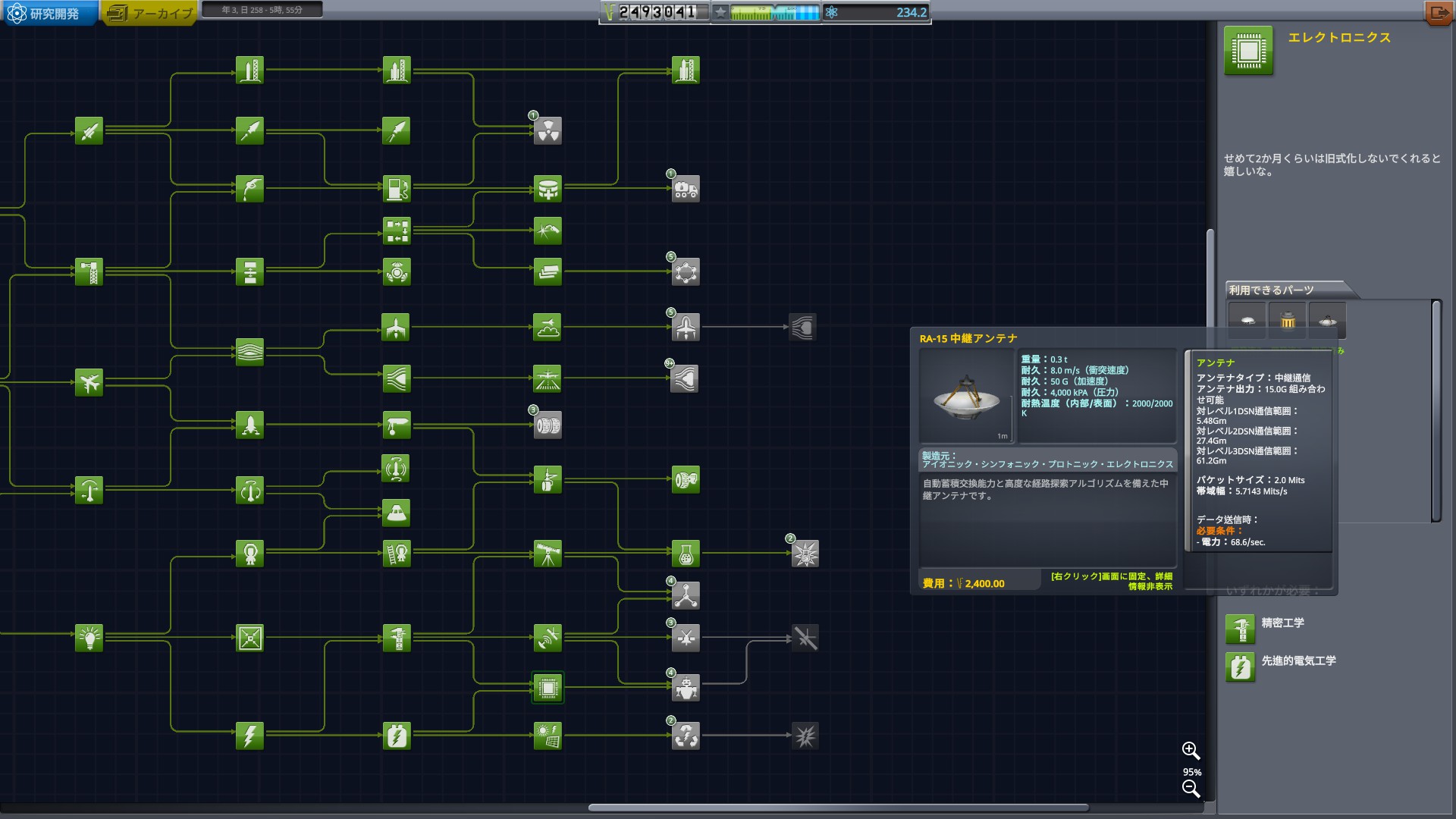
まだ全てを解放したわけじゃないので、搭載可能なアンテナはRA-15中継アンテナが限度なんだが、まあ、隣の惑星だし、大丈夫だろう(気軽)
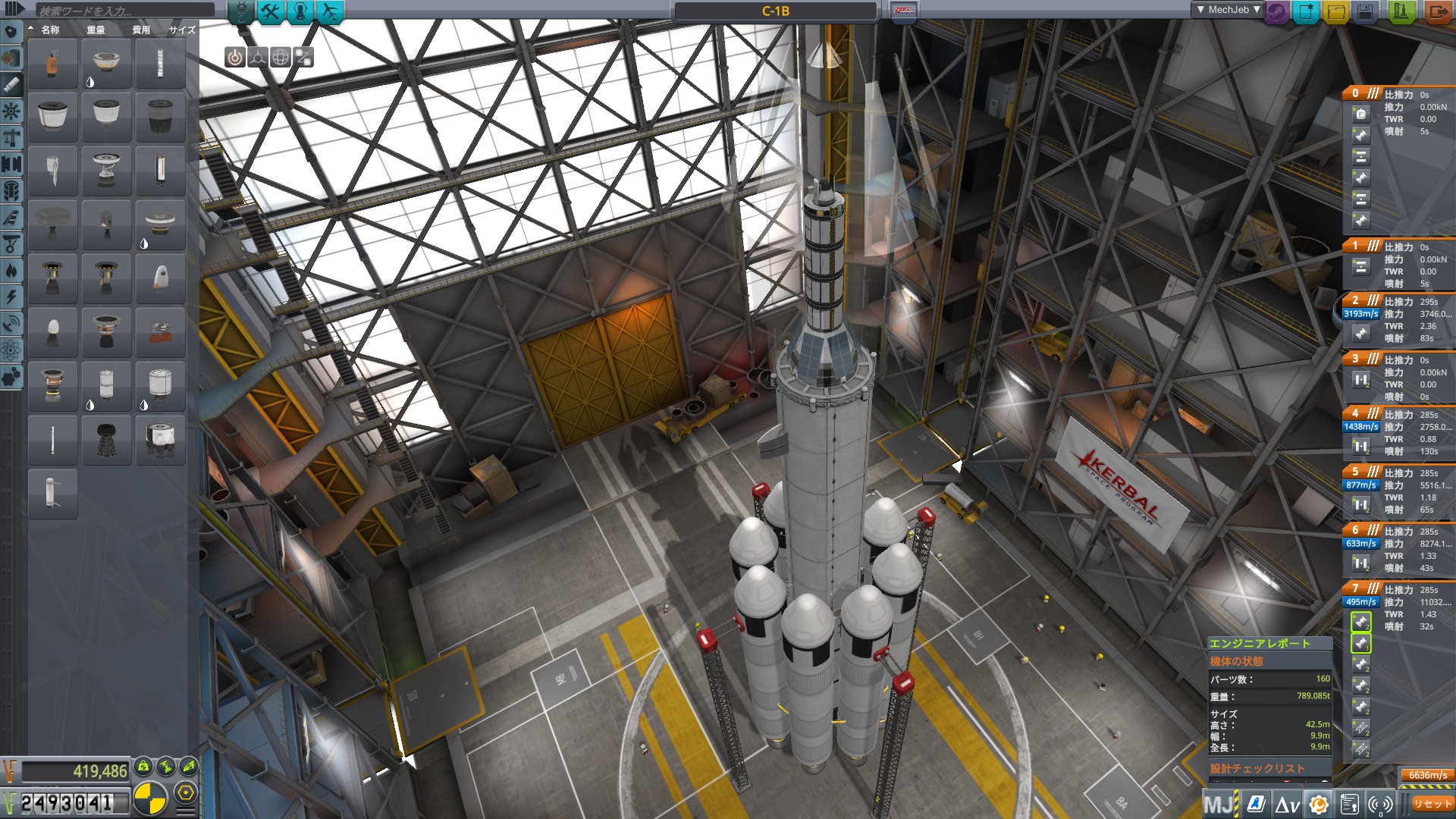
イブ探索用に用意したロケットなのだが、ついでに通信衛星も投入しておこうと思って、ムンやミンマスで使ったキャリアロケットを強化流用することにした。
結論から言うと、全くΔVが足りなかった(打ち上げ時は6636m/s)。

通信衛星(兼偵察衛星)を極軌道に投入することもできず燃料切れとなる始末orz
キャリアロケット自体は高軌道と低軌道宇宙空間の調査を終え、送信後、イブ地表に投棄することに。
次はちょっと考えよう(自戒)
その間に、ミンマスでは…
で、またもやこのイブ探査計画に2年以上の月日を費やしたもので、その間にミンマスに滞在中の移動研究室がサイエンスポイントをガッツリ稼いでくれた。
前回の反省から、定期的にサイエンスポイントを送信するようにしたからね!

サイエンスポイントのもととなるデータ量が少なくなったので、移動研究室の拠点を極点(新たなバイオームならどこでも良かった)に移動。
もちろん裏側に入っちゃうと発電の問題が出てくるので、ギリギリ太陽光の当たるところで研究を続ける(笑)
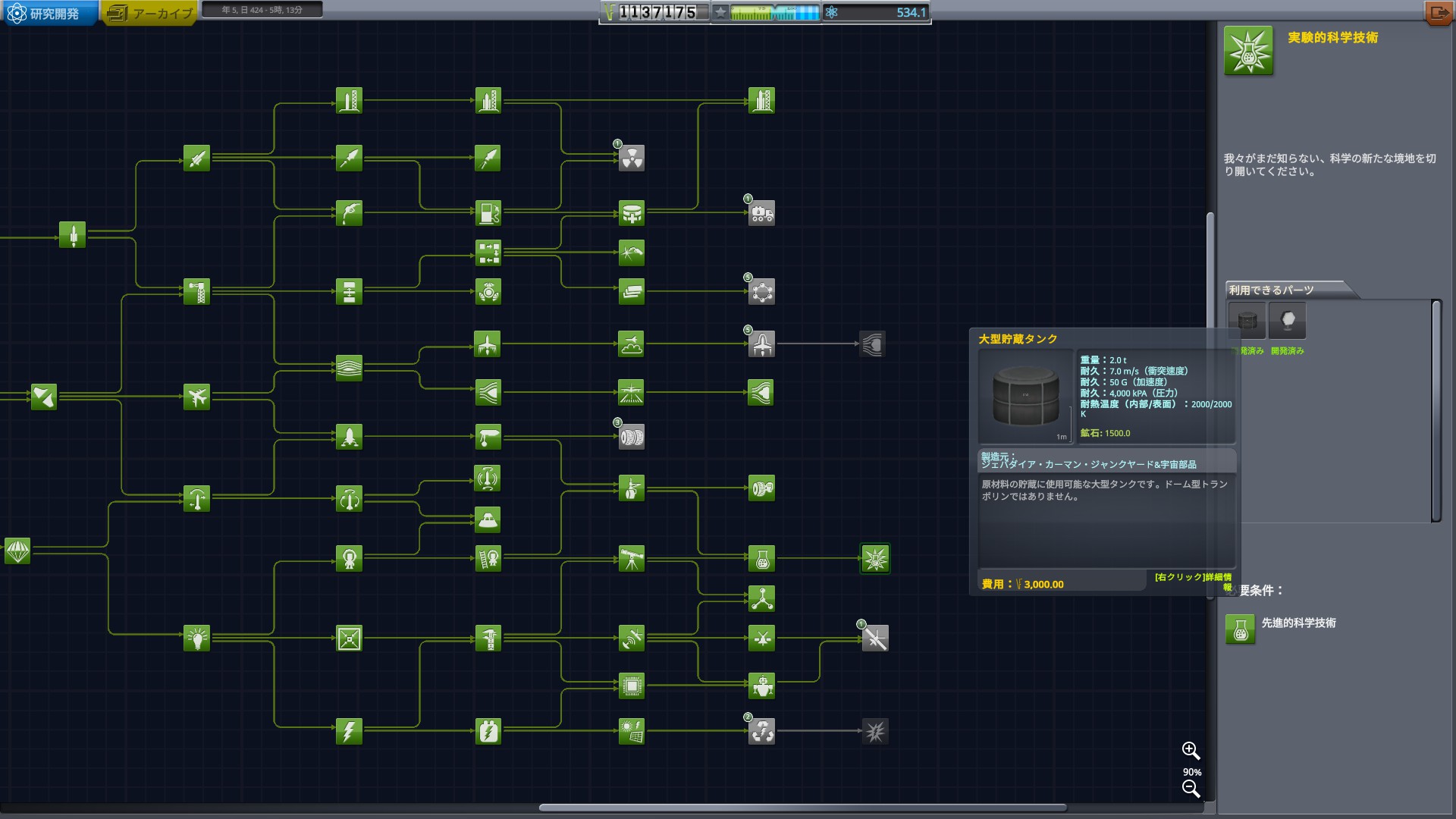
技術に関しては、とりあえず下図ぐらいにはなった。
(MOD) Kerbal Planetary Base Systems
宇宙基地といえばKerbal Planetary Base Systemsというぐらい(自分的に)有名なMOD
宇宙基地を建設するために必要なパーツは全て入っている。
いや、もちろんバニラでも宇宙基地の建設はできるのだが、いかんせん、カッコよくない(致命的欠陥)
(MOD) SCANsat
SCANsatは別に必須なわけじゃないが、惑星探査をよりリアルにするMOD。
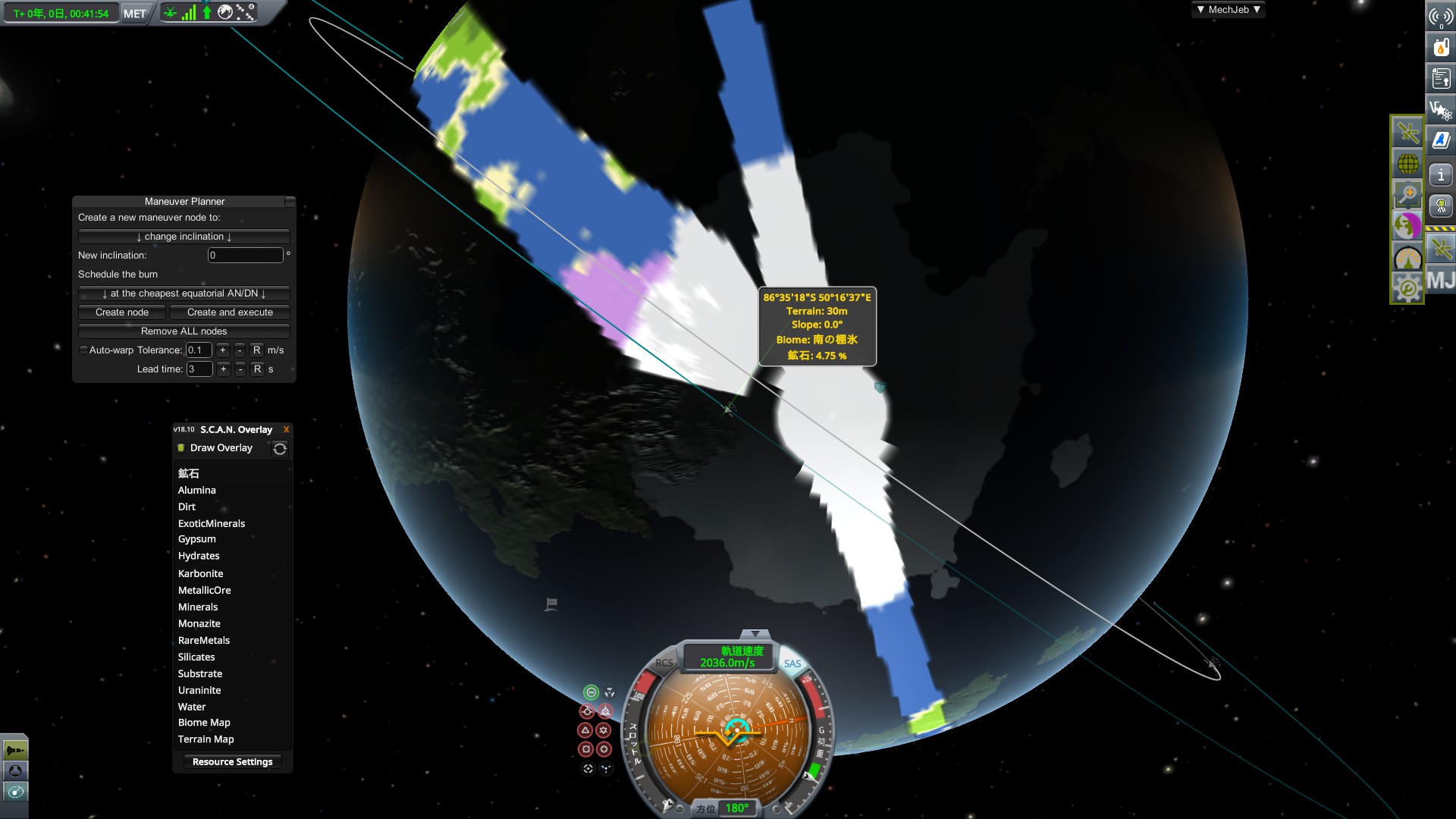
SCANsatで追加されたセンサ類を取り付けた人工衛星を極軌道に投入して活用すれば、上図のように取得したデータを星上に投影できる。
バイオームマップを投影すれば、サイエンスポイントの取得が捗る。
(MOD) Kerbal Inventory System (KIS)
これ自体は別に要らないのだが、次のKASを導入する際にこのKISも導入しなければならないらしく導入しているだけ。
なお、2019/01/20現在において、最新verが1.5.1までしか対応していないが、とりあえず使える。
(MOD) Kerbal Attachment System (KAS)
KASに出てくるワイヤーが最強。
ぶっちゃけ、Mechjeb(超えられない壁)の次にチートっぽいチート(笑)
これまた2019/01/20現在において、最新verが1.5.1までしか対応していないが、とりあえず使える。
宇宙ステーション建造計画
宇宙ステーションをミンマスに建造する。
まず、そもそも論として、なぜ宇宙ステーションが必要なのか?
簡単に言えば、ガソリンスタンドが欲しくなったんだ。
だってカービンを抜けるのだけでΔ3400m/sものエネルギーを持っていかれる。
これは結構な損失だ。
カービンから太陽軌道に乗っかることを想定すれば、Δ4000m/sを軽く超えるほど。
他惑星への着陸を考えなければ、別にカービンから打ち上げて直接惑星に行っても問題ないんだろうが、着陸までしたいからねえ。
特にイブに(笑)
で、次になぜミンマスなのか?
ムンだと重力があり過ぎるので、ムンへの離着陸だけでΔVをかなり使ってしまうため却下なのだ。
宇宙ステーションの打ち上げロケットは以下のとおり。
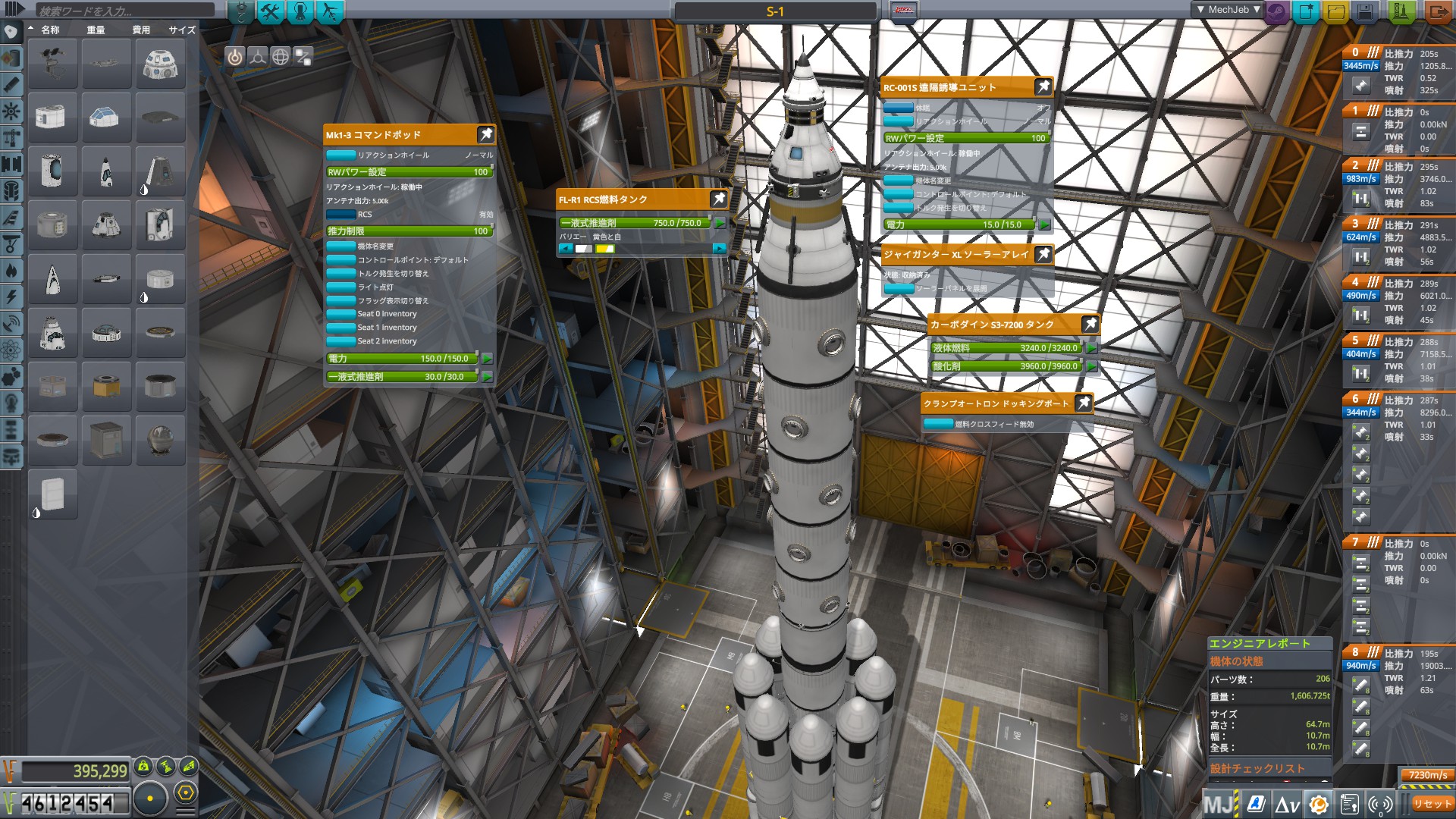
最終的に、ミンマス周回軌道に投入する。

給油所なので、ほぼ燃料タンクだ(汗)
どこからでもドッキング(接続)できるように、ドッキングポートを多数配置している。
また、コマンドポッドを装備しているが、この宇宙ステーションは無人機である(RC-001S遠隔誘導ユニットがある)。
地表側機体(給油機)
宇宙ステーションの燃料タンクに燃料を補充する任務を帯びる給油機は以下のとおり。
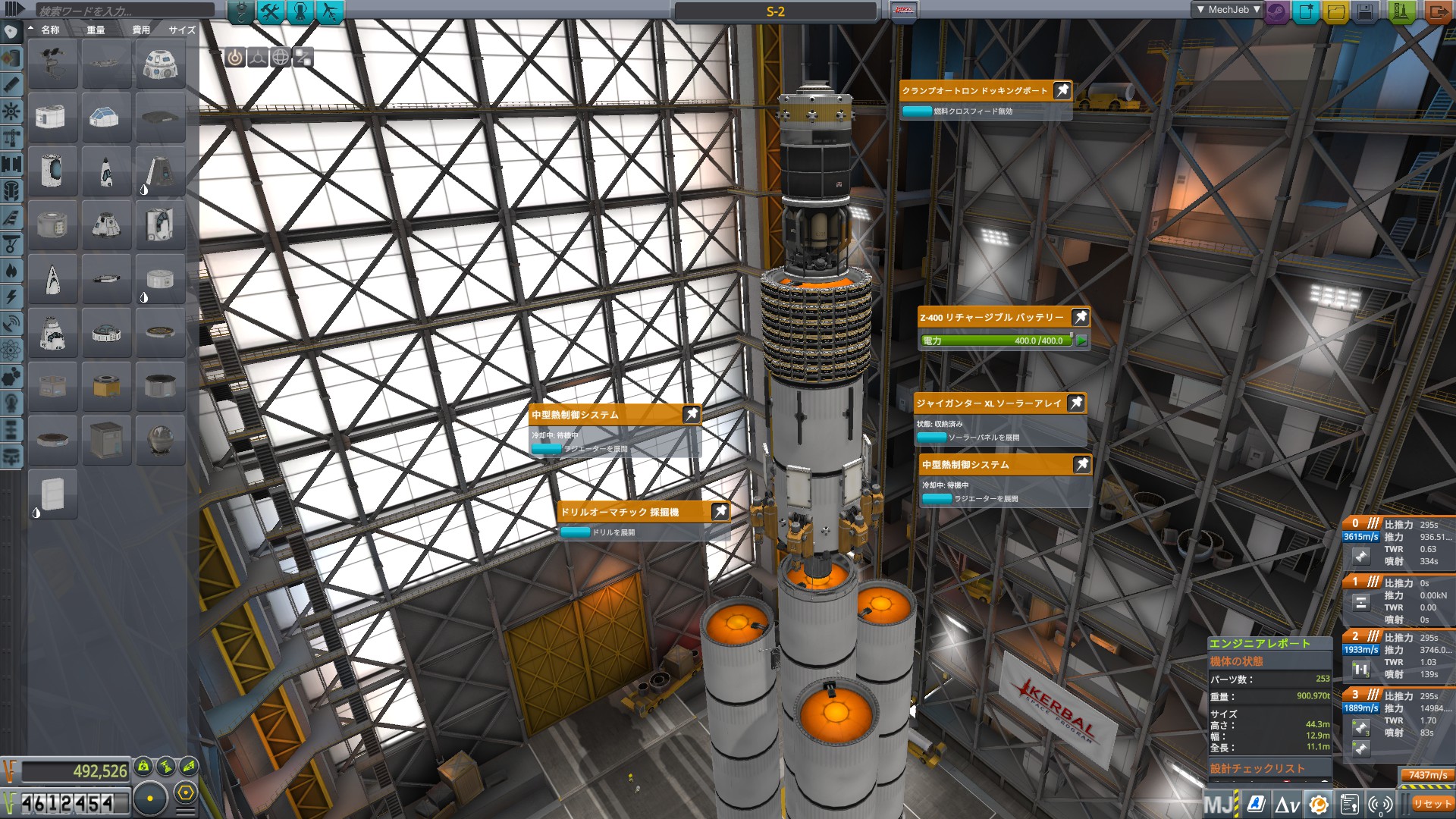
とても大事なこと。
この給油機は宇宙ステーションとドッキングする。
その為、かなり多めのRCS用のエンジン(具体的にはRV-105 RCSスラスターブロックとブレイスエニウェア7リニア RCSポート)を大量に配置しておいた方が良い。
燃料や鉱石満載状態だとかなり重いので、それに見合ったRCS用のエンジンが必要である。
また、それにより一液式推進剤の燃料タンクも大型なものが必要となる。
実際にミンマス着地したときは、

こんな感じ。
流れとしては、
- 「ドリルオートマチック採掘機」で「鉱石」を採掘する。
- 採掘された「鉱石」は「大型貯蔵タンク」に貯蔵される。
- 「大型貯蔵タンク」に貯蔵された鉱石は「コンバートオートロン250」によって「燃料」に精製される。
という流れ。
採掘する場所なのだが、ミンマスの鉱石源ってあまり目ぼしいところが無かった。
なので、上図のようにとにかくドリルオートマチック採掘機を多く装備しておいた方が良いと思われる。
たくさん装備しておけば効率5%ぐらいでも、14日~20日程度でカーボダイン S3-7200の3連ぐらいなら満杯にできる(リアルプレイ時間でいうと、時間加速すれば一瞬だ)。
機体には数多くの電池を装備しているのだが、まだこの時点では大容量電池(特殊電気工学で解放されるZ-4K)の研究がまだなので、仕方がなくZ-400を大量に敷き詰めているだけだ(汗)
電池がたくさん必要な理由(ほんとはこの半分で良かったっぽい)
唯一の発電設備であるソーラーパネルは昼間しか発電されないため、夜間も仕事を途切れることなく続けるには電池が必要だった。
(電力切れを起こすとドリルが自動的にOFFになり、電力が戻ってもOFFのままなので操作が面倒なのである)
純粋に効率だけを考えると3機体制が良いと思われる。
宇宙にずっといる宇宙ステーション、地上にずっといる採掘機、両者を結ぶ給油機、みたいな感じで。
だけどな、そうなるとリアルのプレイ時間が長くなるんだよっ!(要するに面倒くさいのである)
多少効率は悪いにしても、2機体制なら、実質操作するのは給油機一つだけなので操作がラクなのだ。
あ、もちろんこの子も無人機である。
ランデブー&ドッキング
ランデブーやドッキングはラクしたかったので、Mechjeb先生にお任せすることにした。
なお、Mechjeb先生が操作しやすいよう、くどいようだがRCS周りはしっかり配置した給油機を作っておくこと。
でないとドッキングできないからね?(断言まではいかないが、かなり難しくなる)

- ランデブー … 2つのロケットが近づくこと(近い軌道を取ること)
- ドッキング … 2つのロケットがくっつくこと
なので、給油機をミンマス周回軌道に乗せたら、まず宇宙ステーションとのランデブーから入ることになる。
Mechjeb先生によればランデブーの手順は、
- ターゲット(今回は宇宙ステーション)と軌道傾斜角を合わせる
- ターゲットと遠点上で交差するように軌道を修正する
- ターゲットと交差したら、近点もターゲットの軌道に合わせ、ターゲットと同一の軌道に合わせる
- 微調整(ターゲットに近づく)
といった感じ。
これを全て自動でやってくれるのだが、どれだけ有難いことか…。
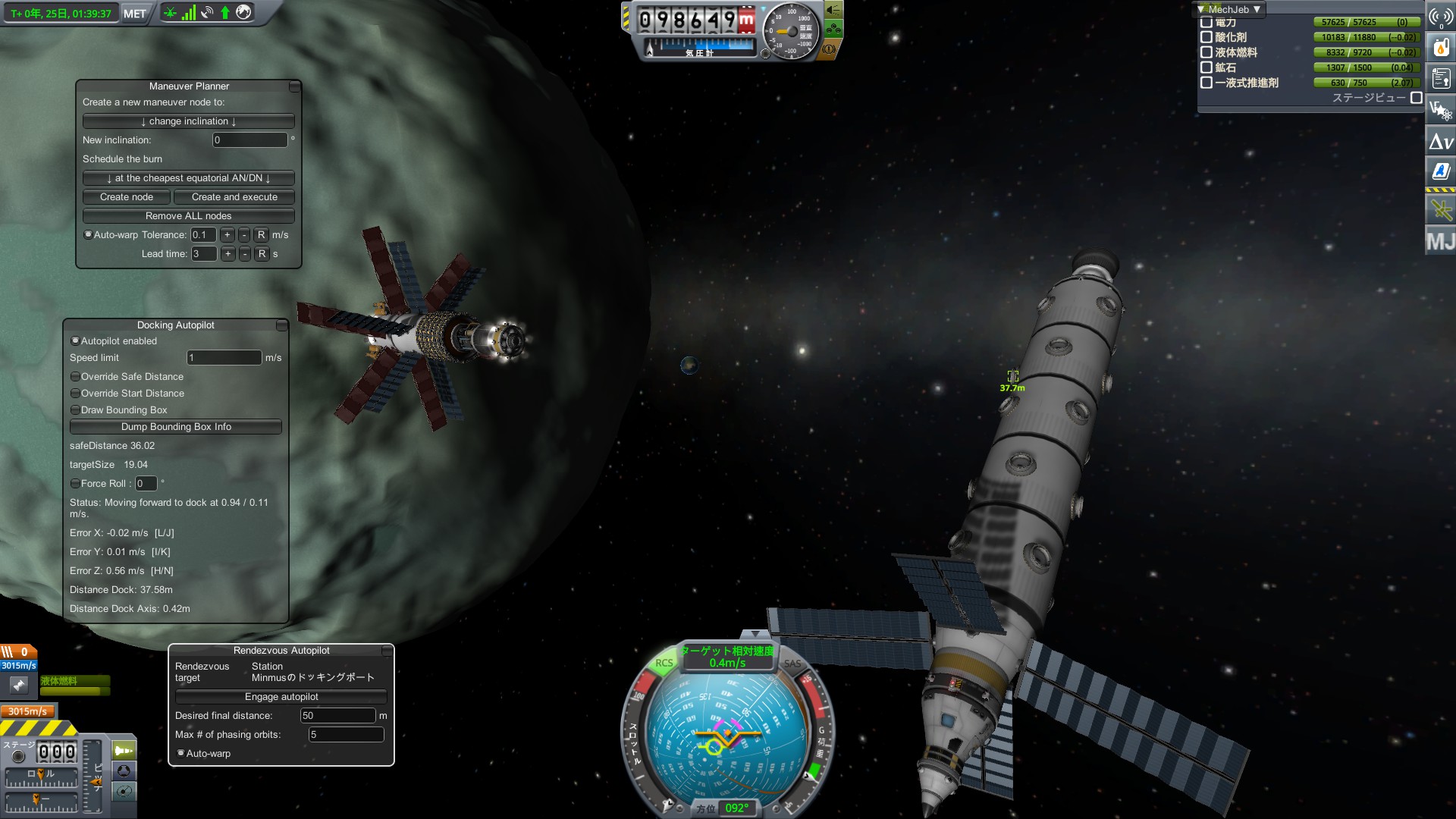
ランデブーが完了したら、お次はドッキングである。
ただし、ドッキングする前に、ちゃんとターゲットを再設定しておくと良い。
というのも、ランデブーのときは宇宙ステーションそのものをターゲットにすれば良いが、ドッキングのときは、接続したいドッキングポート先をターゲットに設定し、かつドッキングポート元を操作対象に設定する必要がある。
双方のドッキングポートをターゲットに設定したら、あとはAutopilot enabledにチェックを入れて、しばらく放置すればOKだ!

何度も言うが、RCS周りはしっかりと配備したロケットを用意するべしっ!(何回リロードしたことか…)

ドッキングが完了したら、移動元と移動先の燃料タンクを右クリックして、インなりアウトなりのボタンを押せば燃料の移動ができる。

燃料の移動が終わったら(もちろん着地できる程度のΔVは残しておくこと!)、ドッキングを解除して、再び採掘しにミンマスへと降り立つのだ(以下無限ループ)。
よし、これでイブへ再びチャレンジする準備が整った!!
…あれ?
今日紹介したMOD、全く使ってなくね?(滝汗)